
Now that we have established the basic parameters, we need to move on to the spring constant calculations. Here we run into some things that frankly don’t make a lot of sense, perhaps the reader can help to resolve the dilemmas. The original calculations are here.
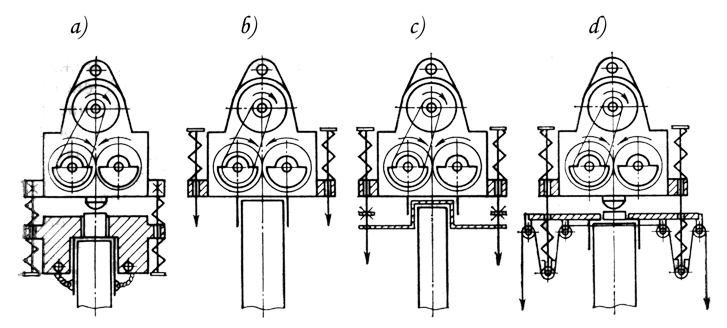
Let’s start by looking again at the basic impact-vibration hammer above. All of these variants suspend the impacting mass with springs, making a single degree of freedom vibrating system. The natural frequency of this system is thus:

Solving for the spring constant,

Since we computed earlier that ω1 = 27.24 rad/sec and M1 = 650 kg, the spring constant is k = 482,479.7236 N/m.
The spring constant is divided between the upper and lower springs (3), as shown for this machine below.
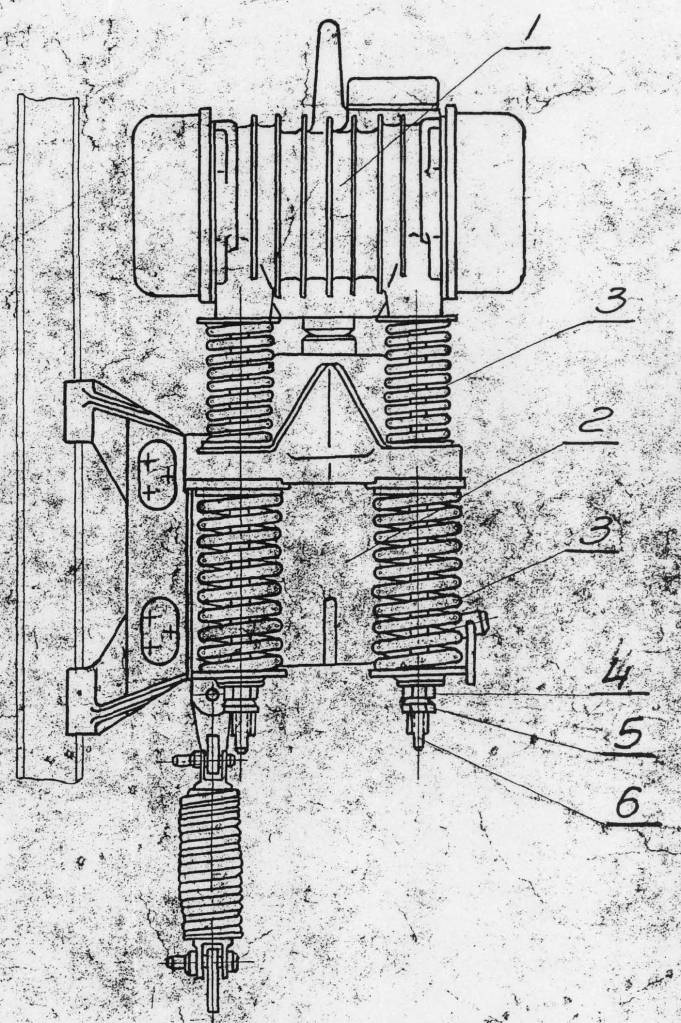
The procedure then tells us that the spring constant of the upper springs needs to be computed first because “The upper springs are necessary to provide positive gaps, so their stiffness should be minimal to provide undisplaced operation the springs in the whole range of gap adjustment.” This is another way of saying that the springs shouldn’t compress flat during operation, and probably shouldn’t go into tension as well since they’re designed for compression.
They then tell us that the upper spring constant is computed by the equation (using our notation)

where ku is the upper spring constant, a is the half-amplitude of the system, gc is the gravitational constant, and A is another constant defined as follows:

where F is the dynamic force.
Noting that

where K is the eccentric moment (we discussed this in an earlier post) and
![a_0 = \frac{K}{M[1]}](https://s0.wp.com/latex.php?latex=a_0+%3D+%5Cfrac%7BK%7D%7BM%5B1%5D%7D+&bg=ffffff&fg=333333&s=0&c=20201002)
where a0 is the theoretical half-amplitude, the spring constant equation becomes

We have two amplitudes here: a0, which is the theoretical, “free-hanging” amplitude of the system, and a, which is modified by the frequency ratio i as follows:

From Equation (6) a0 = 0.00755 m, and from Equation (8) a = 0.00805 m. At this point we’re left with α, which is described as the “number of vibrations of the ram” (?) and the “…coefficient which depends upon i and R’. Hammer coefficient of velocity recovery may be increased up to R’ = 0.2. In this case α = 7.1.” How they came up with this is unclear. If we assume this amplification factor to be true, and substituting that and everything else into Equation (7), we have ku = 191,439 N/m.
At this point we have a potentially more serious problem: in order to obtain the lower spring constant kl, ku is subtracted from k. Inspection of the diagram above will show that the springs are in fact in series, thus the relationships between the constants is

Substituting yields kl = -317,362 N/m, which is close to the solution given but opposite sign. One way of justifying the sign is by noting that the lower spring acts oppositely from its upper counterpart. In any case somehow they have managed to “land on all fours” with this calculation but it is not clear how this happened.
As far as the calculations for the springs themselves are concerned, they used a handbook for this purpose. The reader is referred to our post Analysis of Springs with Circular Cross Section to discuss the method described by Russian engineer Belyaev.


One thought on “Checking the Soviets: The Strange Case of the Spring Constants”