

This is the first in an aperiodic series on design calculations for a piece of experimental Soviet construction equipment, in this case an S-834 impact-vibration hammer. A more complete history of these machines (a co-author was one of the designers) is here. We’re going to compare the calculations originally done on these machines with what the parameters actually are. This should be of interest, not only to those who study Soviet engineering, but also of more general interest to mechanical designers.
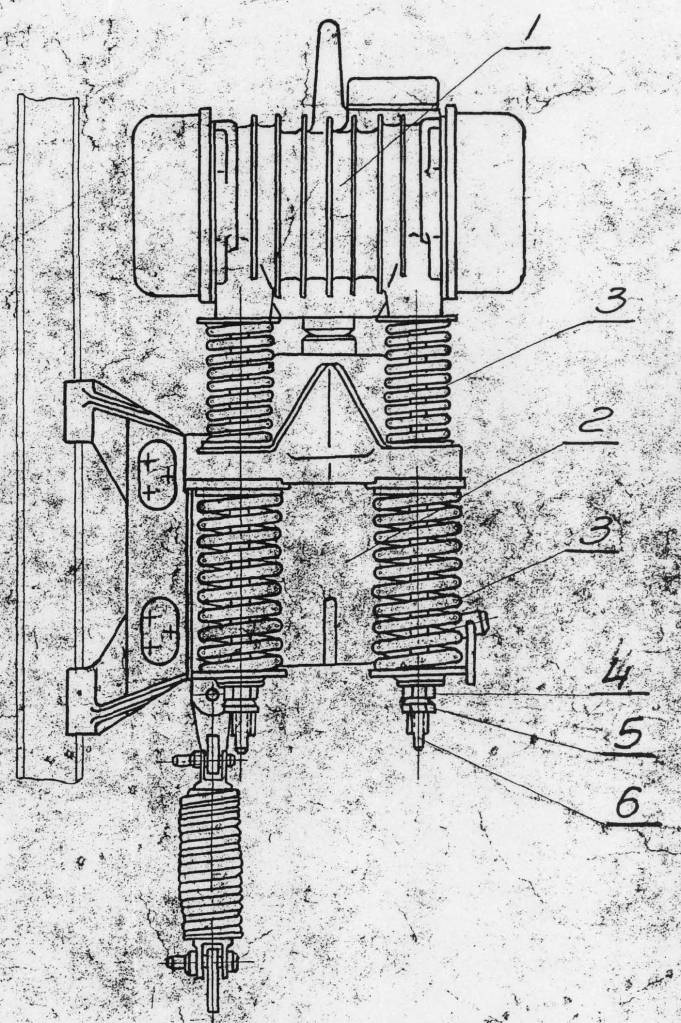
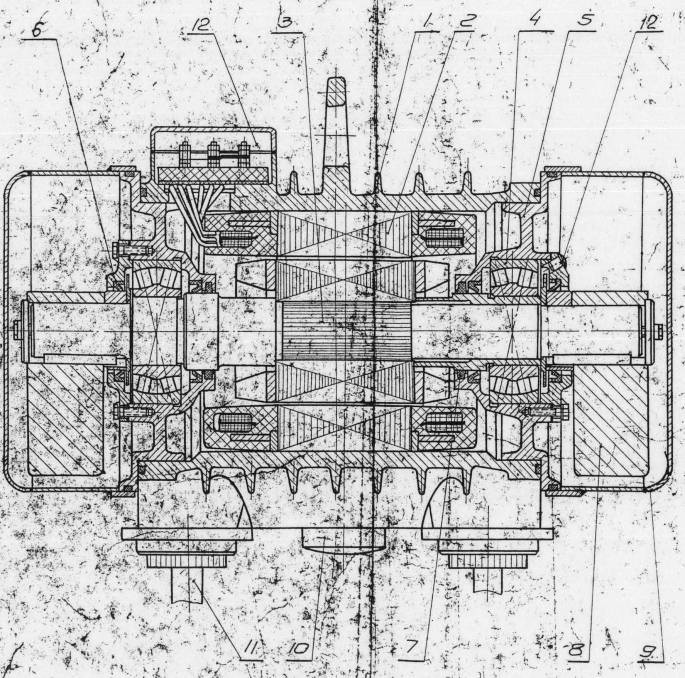
A quick overview: an impact-vibration hammer is a machine that operates in a vibratory manner (eccentrics rotating, etc.) but the body actually makes impact with the pile. The S-834, dating from the early 1960’s, looked like the diagram below.
The eccentric profile looks like this (I checked it with the drawing, which is a good idea.)

The Soviets first determined the necessary dynamic force of the eccentrics to be 5000 kgf. This was a machine parameter and hopefully we will come back to how this is computed for an impact-vibration hammer. This is the same dynamic force that is computed with conventional vibratory pile drivers. Assuming a rotational speed of 960 RPM, the angular velocity ω of the eccentrics is 100.5 rad/sec, which the Soviets rounded to 100 rad/sec. (It’s an interesting rule of thumb that 1 RPM translates into 10 radians/second.)
The formula to relate the dynamic force to the eccentric moment is given by the equation

where F = dynamic force, kgf, K = eccentric moment, kgf-cm, g = gravitational constant = 981 cm/sec2, and ω = angular velocity of the eccentrics. It’s worth noting that the old system the Soviets (and many others) used made the eccentric moment a force x distance quantity rather than a mass x distance quantity like it is in the SI system. (In U.S. units, in-lbs of eccentric moment is a force-distance quantity…)
Solving Equation (1) for the eccentric moment yields K = 490.5 kgf-cm. Since there are two eccentrics (there are two shafts with two motors and four eccentrics total) the eccentric moment for each eccentric is 490.5/4 = 122.6 ~ 123 kgf-cm.
So far, so good. They went on to compute the eccentric thickness to be 8 cm to achieve the desired eccentric moment. The problem is that they assumed that the eccentric portion of the eccentrics was a sector with a half-angle α = 60 degrees, or a full angle of 120 degrees. They did this with no apparent justification. So how can we avoid this assumption and compute the eccentric moment?
To accomplish this we will make two assumptions. The first is that the shaft is solid (which most of the drawings show is the case.) The second is that, with a solid circular segment, we will compute the total mass and centre of gravity, and multiplying the two compute the eccentric moment. It is unnecessary to assume an “eccentric portion” of the eccentrics, and in fact considering the entire eccentric body is essential when we get to inertial considerations.
Generally speaking, when we consider a circular segment, we consider a section where α < 90 degrees. However a segment can certainly have a valve of α greater than this. In geometric tables either the full or half angle is used; for our purposes we will use the half angle α, as is shown in the eccentric profile above. The area of this segment (including the centre hole) with the angle defined in this way is

The distance of the centre of gravity from the centre of rotation (shaft centre) is

The eccentric moment is thus

where ρ = density of steel = 0.00778 kgf/cm3, t = thickness = 8 cm. We can compute the angle by adding 90 degrees to the angle between the horizontal line running through the centre of the shaft and the line from the shaft centre to the corner of the segment. By geometry α = 97.9 degrees. Substituting all of this into Equation (4) yields K = 137.4 kgf-cm of eccentric moment, which is greater than the Soviets originally computed.
If we turn to the issue of rotational inertia for this segment around the centre of rotation is

For this eccentric Jo = 2808.3 kgf-m2. It’s true that the mass moment of inertia is a mass moment and not a weight moment, but in this system we can simply change the kgf unit to kg to achieve this (as is the case with the eccentric moment.) The pendulum frequency is given by the equation

In this case the thicknesses, densities and even the issue over the gravitational constant in the kgf cancel each other out and this yields ωo = 6.928 rad/sec, or RPMo = 66.2 RPM, which is similar to those experienced in vibratory pile drivers.
It should be noted that the pendulum frequency of the machine in practice will be lower than this because of the effect of the shaft connecting the eccentrics through the electric motor, which will increase the inertia without increasing the eccentric moment. The eccentric moment computed by the Soviets, however, is 10% off of the actual value, and this is significant, albeit the actual value is larger than that which was computed.


5 thoughts on “Checking the Soviets: Determining the Eccentric Moment”