
Immersion in the ground of bodies subjected to vibration represents a complex mechanical phenomenon. Let us consider the features playing the most significant role in the process of vibration immersions so you can correctly understand the mechanism of this process.
Imagine that at the head of a pile immersed in the ground to a certain depth, a directional vibrator is attached action that excites pure longitudinal vibrations of the pile. Let us say that the total weight of the pile and the vibrator is small compared to the ultimate static capacity on the pile. After switching on the vibrator, we will observe the behavior of the pile with a gradual increase from zero of the rotational frequency of the vibrator’s eccentrics.
At relatively low frequencies, relatively weak elastic oscillations of the pile and the soil mass take place near the equilibrium position; adjacent to the surface of the body, soil layers will move with it and no immersion will occur. When the frequency reaches a certain limit, the first relative displacements of the pile body and soil will occur, usually detected by the slow sinking of the piles. These shifts take place in a relatively narrow frequency range (at some frequency 
With a further increase in the vibration frequency, the amplitude become constant, close in magnitude to the amplitude 
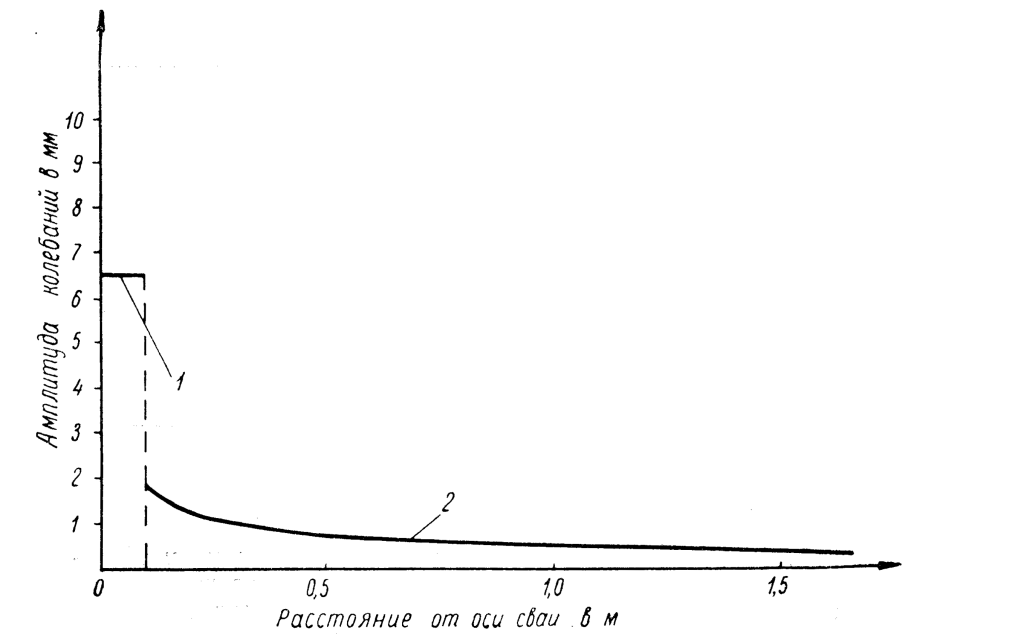
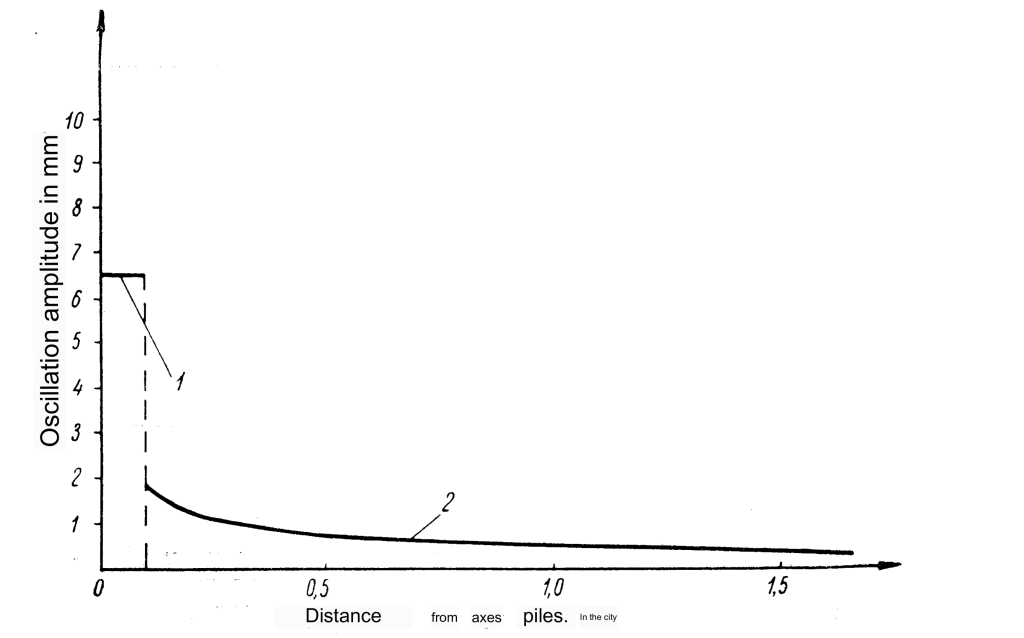
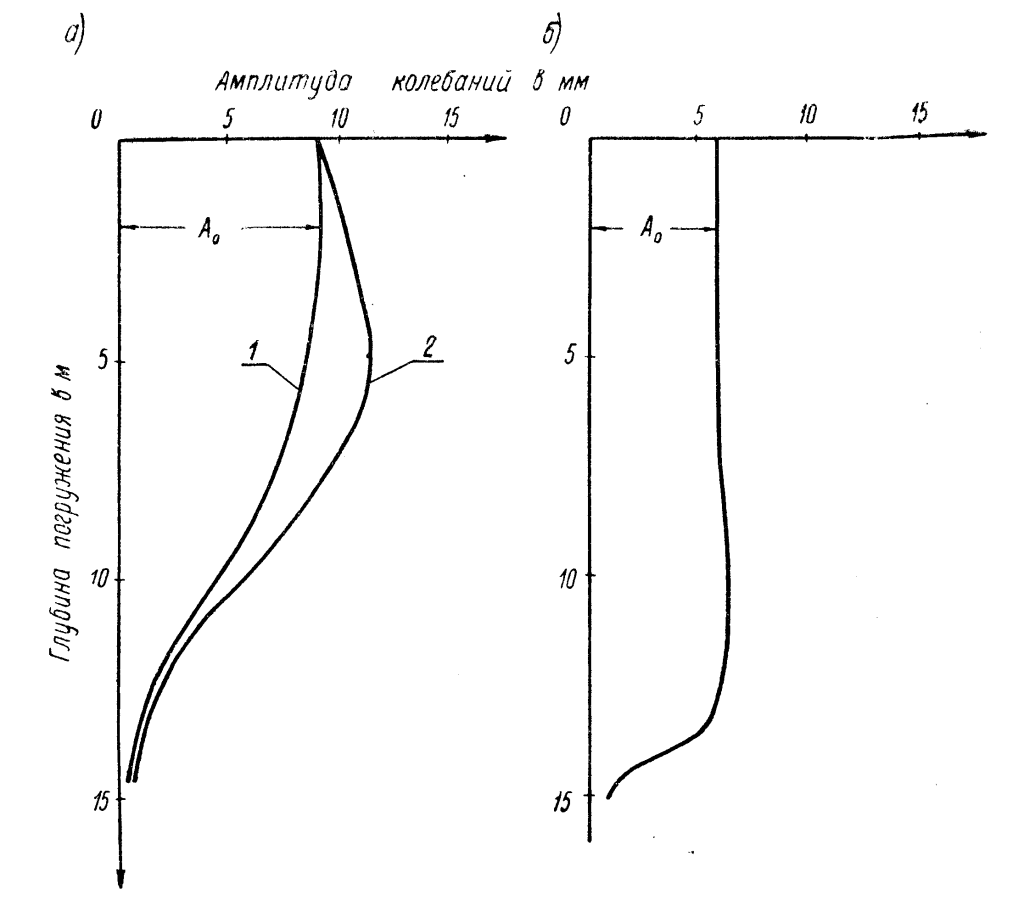
The above description of the general features of the process dives are conveniently illustrated by a graph (Figure 1.) On this curves are shown in the schematic diagram with solid lines changes in the oscillation amplitudes of the pile (Curve 1) and the soil next to it (Curve 2); the dotted line shows the imaginary curve that shows how things would be if if the soil had such strong internal bonds and such adhesion to the surface of the pile that the failure of the latter could not take place.

The graph under consideration refers to the case when the breakdown piles occur in the pre-resonant region or at resonance.* This is usually observed when using low-frequency vibrators with heavy eccentrics, developing sufficient force at relatively low frequencies to break the pile. However, there may be cases where the breakdown of piles takes place outside the resonance area. This position can take place, for example, when driving piles with high-frequency vibrators, developing at those relatively low frequencies at which resonance appears, very slight disturbing forces insufficient to break the pile.
*Here we mean resonant vibrations of the main (lower) type, in which the pile itself almost does not deform and behaves like a solid body trapped in an elastic soil massif.
It can be seen from the graph that after the disruption (which occurs on the section tn) the pile vibration amplitudes tend to become constant, approaching as the frequency 
It should be noted that everything said about the features behavior of a pile subjected to directional (axial) vibrations, will remain in force only as long as elastic deformations of the pile itself are small compared to the vibration amplitudes of the pile and the attached vibrator, which allows one to consider it as a rigid (non-deformable) body. This last the assumption can be considered valid as long as the length piles will be significantly less than the length of the elastic waves or, which is practically the same thing, until the first the frequency of natural longitudinal oscillations of the pile, as an elastic rod, will be significant – at least 1.5-2 times higher frequency of rotation of vibrator eccentrics. Otherwise during the operation of the vibrator, forced elastic fluctuations of the pile will occur, the maintenance of which will require a significant part of the energy. Complete failure of the pile, which, due to inertia soil and the limited strength of its connections with the submerged body, would certainly arise sooner or later if this body had absolute rigidity, in this case it may not happen, and immersion becomes difficult or not feasible at all.
Calculations show that the first frequencies of natural longitudinal pile oscillations, if we consider each of them as an elastic rod with a load at one end and elastic clamping on the other [56], are quite high for reinforced concrete piles are at least 2000-2500 counts/min, wooden – 2500- 3000 and steel sheet pile – 3000-4000 counts/min. At that the same time the frequency of the vibration machines, as we will see below, do not exceed 1500 counts/min. Thus, the above ratio between the frequencies natural and forced oscillations is usually observed. In some cases, for example, when immersing or retrieving steel casing strings, it may be different, which should be taken into account when selecting the parameters of vibratory hammers.
Developing the general characteristic of the process begun above vibration immersion, consider some experimental data.
Let us start with data from an experimental study of the stall phenomenon in piles. The very existence of this phenomenon is not in doubt. The surface of a rusty steel pipe after several successive sand diving and recovery from it with the help of a vibrator becomes smooth, polished, which can be explained by slippage of the pipe surfaces on the ground with friction.
| Material and dimensions of the pile, soil characteristics | Oscillation frequency in RPM | Oscillation Amplitude, mm | Researcher | ||
| At stall | During installation in which the magnitude is measured | Measured | Computed without taking soil resistance into account* | ||
| Larsen IV steel sheet piles, 14 m long, sandy loam, varved clay, moraine loam | Not established | 2300 | 1.5 | 1.52 | O.A. Savinov and A. Ya. Luskin |
| Flat steel sheets, 14m long, medium-grained saturated soil | 800-1000 | 1500 | 4.9 | 4.95 | |
| Wood piles, average diameter 26-28 cm, 13 m long, fine-grained saturated sands | 600-900 | 1500 | 4.6 | 4.59 | |
| Wood piles, 25 cm diameter, 4 m long | 500-600 | 800 – 1200 | 7.0-7.2 | 7.8 | N.A. Preobrazhenskaya and O.Ya. Shekhter |
| Reinforced concrete piles, 25 x 25 cm, 6 m long | Not established | 2300 | 1.3 | 1.40 | O.A. Savinov and A. Ya. Luskin |
*Editor’s note: this is what is referred to in American practice as the “free-hanging amplitude,” which is what happens when you hang a vibratory hammer by its suspension without any connection with the soil.
Vibrated steel sheet pile interlocks and surrounding material which have been previously loaded are strongly heated; in the presence of metal influxes in locks, and consequently, increased resistance to their mutual movements, heating increases so much so that the metal begins to melt.
The existence of the disruption phenomenon is underscored by the fact that if the process of vibration immersion is successful, pile vibration amplitudes are very close to the values corresponding to the case of complete absence of connections with the ground. This could not have happened if the breakdown had not happened, so as in the latter case, the magnitude of the amplitudes was undoubtedly affected by would be the “reduced” mass of soil oscillating together with a pile.
How closely does this statement match experimental data? It can be seen from Table. 1. The data cited show that shortly after the collapse of the amplitude pile oscillations become close to the value А∞ , differing from it by no more than 5-10%, and with an increase in the oscillation frequency, practically cease to differ from this value. At the same time, the oscillation amplitudes of soil near the pile are relatively insignificant (see the graph in Figure 2.)
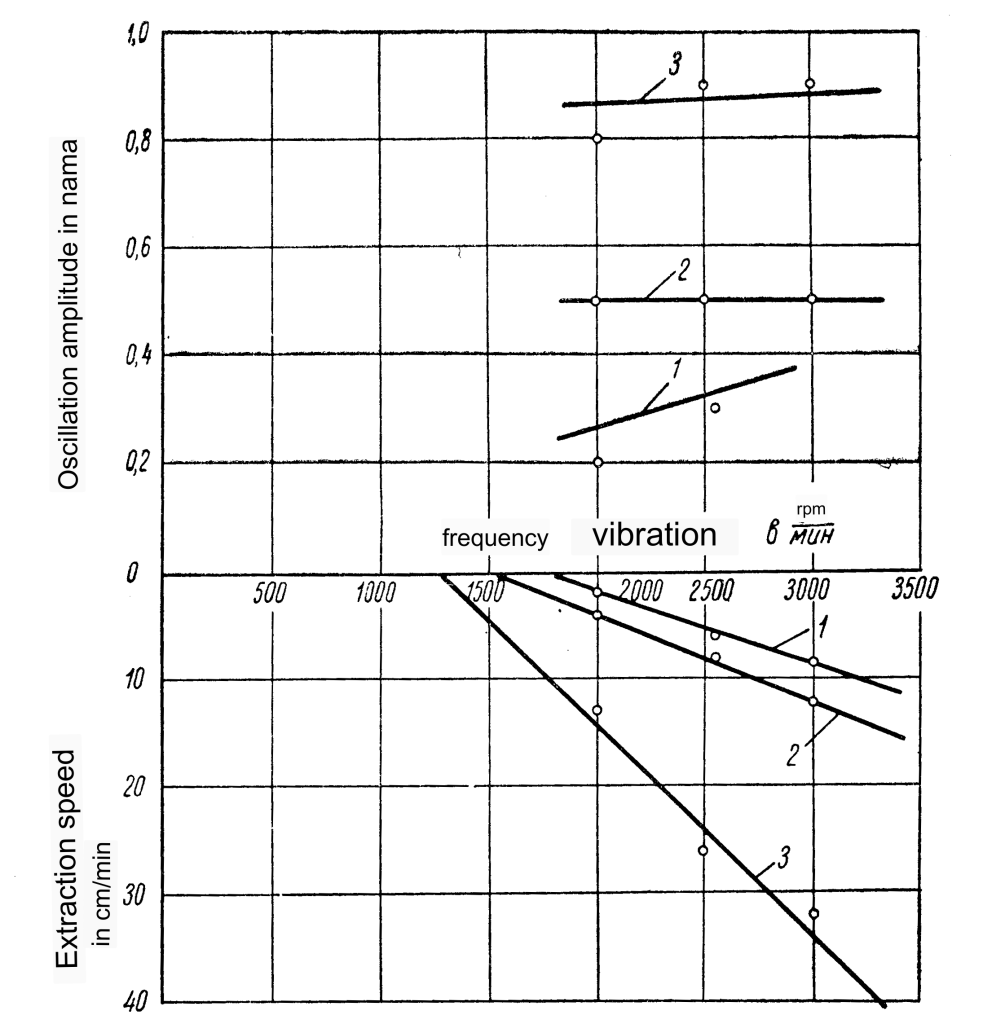
Interesting experimental data by A. Ya. Luskin confirm the correctness of the above, who observed the extraction of a wooden sheet pile with a thickness 6.5 cm and 3 m long from plastic loam.
In the process of observations, measurements were made of the extraction force, extraction speed and vibration amplitude of the sheet pile. The pulling force was kept constant and was about 400 kg. Measurement data allowed is enough to objectively determine the frequencies at which the breakdown, and figure out some patterns essential for a correct understanding of the mechanism process of vibration immersion.
The results of the experiments are presented in Figure 3. X-axis Vibration frequencies are plotted, along the y-axis: up – amplitudes vibrations of the pile, down – the speed of its extraction.
The graph shows that the stall frequency is not constant and depends on the magnitude of the eccentric moment of the vibrator.


 of wooden piles from the eccentric moment of the vibrator
of wooden piles from the eccentric moment of the vibratorThe nature of this dependence can be judged from the graph in Figure 4, confirming that with an increase in the eccentric moment vibrator stall frequency is reduced.
The calculations performed on the basis of experiments lead to the conclusion that in the first approximation for each pile the product of the eccentric moment to the square of the stall frequency we can consider constant; therefore, in this case, the moment of pile failure is mainly determined by the magnitude of the disturbing force, generated during the operation of the vibrator.

Data from experimental studies performed by A. Ya. Luskin coincide with the results obtained by some by other researchers.
We have begun describing the features of the vibration immersion process by considering the dependence of the pile oscillation mode on the change vibrator speed. Meanwhile,modern vibratory pile drivers are distinguished by the constancy of the number of revolutions. We will show how the mode of pile oscillations changes as its immersion in the ground at constant parameters of the vibrator.
On Figure 5 shows typical dependency graphs vibration amplitudes of piles from the depth of immersion. The first one (Figure 5a) is typical for driving reinforced concrete piles with low frequency (400-500 RPM) vibrators and heavy eccentrics, the second (Figure 5b) – for diving relatively light (wood, steel sheet piling, etc.) high-frequency piles (1500-2500 RPM) with vibrators.
From the graph shown in Figure 5a, it can be seen that when using low-frequency vibrators of pile oscillation amplitude in some cases (Curve 1) begin to decrease early in the initial stages of immersion, and in others (curve 2) – at first, some increase, which is obviously due to the elasticity of the soil array. In both cases, at the final stage of the immersion, the amplitude fluctuations are reduced to a certain value, at which the pile is pinched, i.e., its slippage along ground. At this moment, the translational movement of the pile is completely is suspended.
It is important to consider that when using low-frequency vibrators the amplitude of oscillations decreases gradually at a significant immersion depth area. So, for example, L. I. Vasiliev, which carried out the immersion of reinforced concrete piles-shells with a vibrator, having an eccentric moment of 9300 kg-cm and a frequency 420 RPM, indicates [15] that as the immersion progresses, the amplitude pile oscillations changed from 8 to 1 mm.
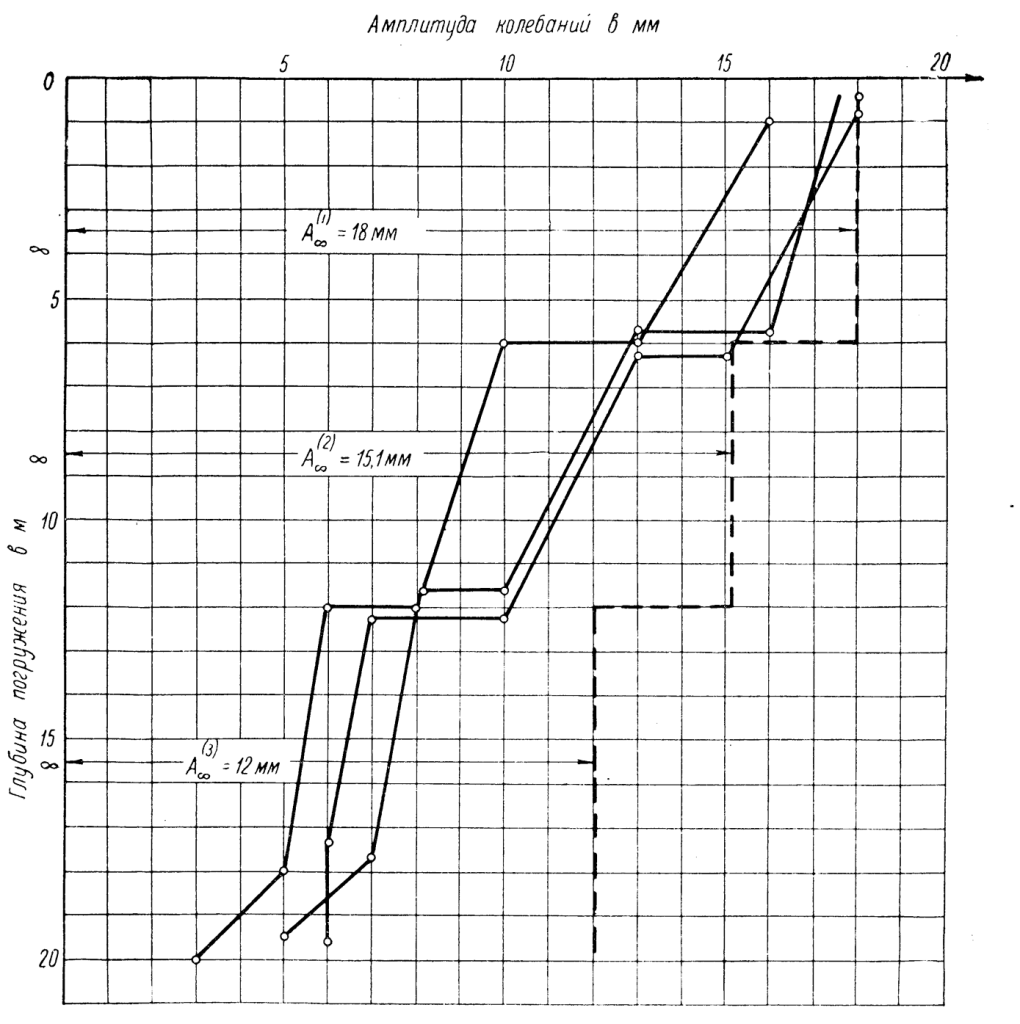
The authors, with the participation of Yu. G. Melbart, A. M. Rukavtsov and E. M. Perley, made measurements of the amplitudes of oscillations of tubular, reinforced concrete piles open from below with outer diameter 0.96 m, length 24 m and total weight 16 t. Each pile consisted of four splices connected in series in the immersion process, which was carried out by a powerful low-frequency vibratory hammer type VP-3 designed by B. P. Tatarnikov: the eccentric moment was 23,600 kg-cm , the frequency was 408 RPM, disturbing force – 44.2 t. The measurements were taken at the beginning and at the end of each work cycle – before and after the first immersion splice, immediately after joining the second, before joining third splice, etc.
Based on the measurements, curves were constructed showing changes in oscillation amplitudes of several composite piles with depth immersions (Figure 6.) The dotted line shows the calculated graph of changes in the vibration amplitudes of a composite pile of a given weight, as a body, free from bonds with the ground. From Figure 6 can see that in this case, the decrease in the amplitudes of oscillations piles with depth starts at the beginning of the immersion process; in the lowest position, before the end of the immersion, the amplitude pile oscillations is equal to approximately ⅓ of the magnitude of the amplitude A∞. The amplitude curves turn sharply to the y-axis, and the transition to pinching the pile in the ground, confirmed a sharp decrease in the rate of its immersion. In this case speed in the last 2 m of the depth of immersion decreased by about from 0.5-0.3 to 0.05-0.02 m/min.
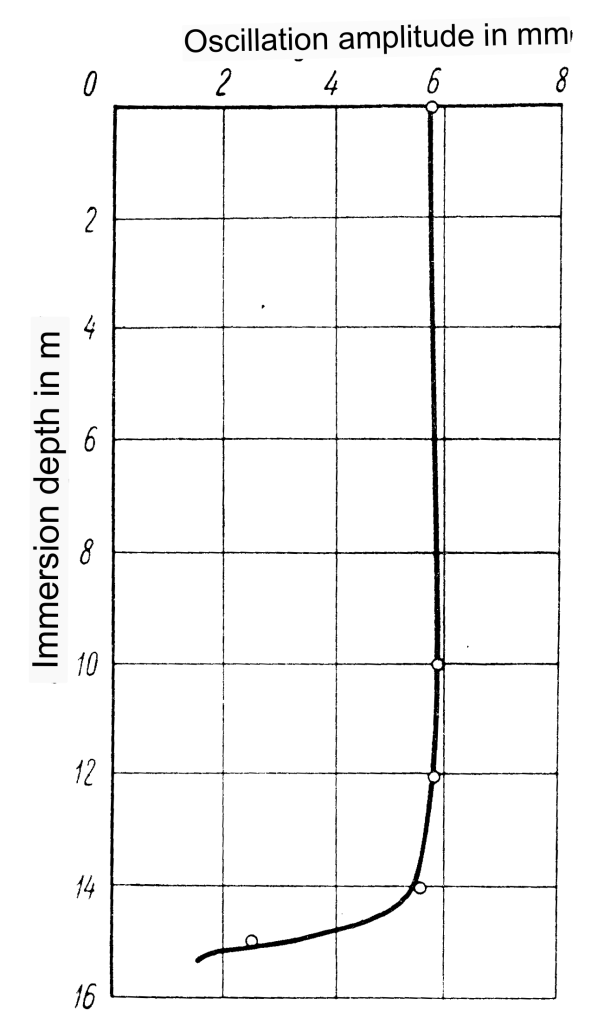
On the nature of the change in the vibration amplitudes of light piles, immersed by high-frequency vibrators (Figure 5, 6,) you can judge by the data of experiments carried out by different researchers. Figure 7 shows a graph of the variation with the depth of immersion of the vibration amplitudes of the steel sheet pile. Curve on the graph built on the results of measurements obtained by the authors in the process sheet piling in sandy water-saturated soils. The number of revolutions of the vibrator was 1500 rpm, the moment of eccentrics was 1000 kg-cm. The graph shows that within almost the entire depth of immersion of the oscillation amplitude retain an approximately constant value, close to the value of A∞ vibration amplitudes of the pile, as a body not connected to the ground. Only at the last moment, coinciding with a sharp decrease in the speed of the translational movement of the pile, is there a steep amplitude drop.

Speaking about the nature of the change in the vibration amplitudes of piles driven by vibrators with the depth of immersion, it is necessary to pay attention to the fact that, as we will see below, this characteristic of amplitude is essential for a correct understanding of the mechanical essence of the vibration immersion process. It turns out that if, after immersing the pile in the ground and stopping the immersion process, we increase the number of revolutions of the vibrator, then immersion, as a rule, resumes. The only exceptions are those cases when the stop is associated mainly with the presence of layers of soil of increased density.
So, according to A. S. Golovachev, V. I. Karpinsky and M. A. Kofman [23], during the construction of the bridge, an attempt was made to immerse reinforced concrete piles 12.4 m long and 35 x 35 cm in cross section with a vibrator with a speed of 420 rpm and an eccentric moment of 9000 kg-cm. The use of this vibrator made it possible to immerse piles to a depth of 6.6-7.5 m. For further immersion, a vibrator of approximately the same parameters was used, but of a different design, which made it possible to change the number of revolutions.

As a result of the test, it was found that the most effective mode is that with the maximum possible number of revolutions. In this mode, an increase in the value of the dynamic force of the vibrator from 17 to 27 tons takes place. Immersion depth is increased by 2 m.
Similar results were obtained in a number of other cases.
It was mentioned above that pile failure most often occurs in the pre-resonance or resonance region. In this regard, the data of experimental determination of the frequencies of the main mode of natural oscillations of piles of various types, obtained as a result of measurements of free or forced oscillations of piles, are of interest (see Table 2).
| Material and dimensions of piles | Brief description of soil conditions | Natural Frequencies of Oscillations, RPM | Researcher |
| Reinforced concrete piles, 30 x 30 cm; immersion depth 8 m | Weak water-saturated sandy and clayey soils | 400-450 | F. A. Krilov and S. V. Puchkov [24] |
| Steel sheet pile type ShK-0; immersion depth 2-12 m | Fine-grained water-saturated sand | 1200–1500 | D. D. Barkan [6] |
| Steel sheet pile type Larsen IV; depths up to 1O m | Irregular water-saturated sands with clayey layers | 1100-1500 | |
| Wooden piles 26 cm O.D.; immersion depth up to 12 m | Weak banded clays | 600-800 | O. A. Savinov And A. Ya. Luskin |
How to explain the effect of a sharp decrease in soil resistance translational movements of the pile under the action of intense longitudinal vibrations? To get the correct answer, you need to consider separately the soil resistance developing during vibration driving along the side faces of the pile (shaft resistance,) and resistance to penetration into the soil massif its tip (toe resistance.)
The main reason for the effect of sharp reduction in vibration immersion of lateral resistances is associated with the well-known phenomenon of reducing the effective coefficient of dry friction during vibrations [12].
Imagine a heavy body resting flat on a horizontal plane. To move it from its place and force it to move along the plane under the action of a statically applied horizontal external force, it is necessary that the value of the latter exceed the value of the friction force, numerically equal to the product of the body weight and the coefficient of friction. If, on the other hand, vibrations of the body are excited (by applying to it a periodic horizontal force exceeding the force of friction,) then any external horizontal force, no matter how small, will cause the body to move forward, although no change in the physical state of matter, both moving and and supporting the motionless body did not happen. The effective coefficient of friction in this case will be equal to zero. Periodic forces here, as it were, took over the fight against dry friction, changing the nature of its influence on the motion of the body under the action of external forces.
Of course, in soils this phenomenon is much more complicated, since it is associated with elastic deformations of the soil mass, and is accompanied by mutual displacements of soil particles (in the area adjacent to the shaft of the pile) and is complicated in many cases by the presence of adhesion. In water-saturated soils, piles are likely to be significantly strengthened—and lateral resistance reduced–by the pressure of the upward flow of groundwater squeezed out of the pores of the soil during its compaction in the process of immersion. The flow buoys soil particles and weakens the bonds between themselves and with the pile body; in loose, water-saturated, fine-grained soils, liquefaction of the soil takes place. The latter circumstance, apparently, explains the fact established by direct observations that in such soils, pile failure occurs not directly along the contact between the side surfaces of the piles and the soil mass, as is observed in coarse-grained sands and dense clay soils, but along the near-wall thin layer of soil.
However, no matter how complex these physical and mechanical phenomena, and no matter how significant their influence on the process of vibrational immersion, these phenomena should only be considered as ancillary. The main thing remains the phenomenon of reducing the effective coefficient of friction, about which we spoke above.
Overcoming the toe resistances of the soil occurs differently in different soils.
In non-saturated sandy and dense clay soils, as well as in any ground conditions when encountering obstacles in the form of solid layers, frontal resistances are overcome by impacts of the toe of the pile, which is embedded in the ground; under the toe the soil is compacted and protrudes to the sides.
In water-saturated soils, the situation is different. Influenced by alternating soil pressures arising below the pile, the toe liquefies and during the operation of the vibrator turns into a heavy viscous liquid in which the pile sinks under the influence of its own weight or floats if its weight is less than the weighing pressure liquefied soil.
To determine the size of the zone of the soil mass, in which when the pile is vibrated, the natural structure is broken. soil, and clarifying the nature of this violation, the authors were experiments were set. A small steel pile plunged into water-saturated sandy soil with colored layers. The sand was placed in a box measuring 0.7 x 0.7 x 0.7 M. The vibrator had an eccentric moment of about 6 kg-cm, The number of revolutions varied from 1000 to 2000 rpm.
As a result of the experiments, it was found that the radius of the zone, in which soil particles are displaced is relatively small and does not exceed 2.5-5 pile radii in slightly damp (Figure 8a, left) and 4-5 radii in water-saturated sand (Figure 8b, right.) This observation was verified by subsequent experiments, in which the pile was immersed in sand with artificially isolated interspersed with colored particles located in a certain way.
In other experiments, glass piezometric instruments were installed in the sand tubes. In the process of immersing the pile, the water level in tubes rose to a considerable height, close to half immersion depth, approximately the same over the entire area of the box. In many cases it was possible to establish the fact of significant sand compaction under the tip of the pile. At the same time, it turned out that particle fracturing occurs in water-saturated sand, and the largest of them fall down.

The above experimental data do not differ from the results industrial of observations showing that not only in sandy, but also in weak clayey soils around piles submerged with the use of vibration, the soil is compacted. It indicates the presence of subsidence of the surface in a radius equal to 3-4 radii of the immersed pile.
At one construction site, a pit for the foundations of a building was dug in soils previously compacted with sandy piles with a diameter of about 0.3 m. Inspection of open walls, which clearly showed the nature and size of the curvature individual layers, made it possible to establish that soil compaction while immersing the inventory steel pipe occurs in the zone, the radius of which turned out to be approximately equal to 0.6-0.7 m. According to the external appearance, the shape of the curvature of the soil layers closely corresponded to that shown in Figure 8.


One thought on “Physical and Mechanical Features of the Phenomenon of Vibration Immersion”