

Most engineers are familiar from their dynamics course (assuming, of course, it was required) with the coefficient of restitution during the impact of two bodies. Then, if they’re introduced to pile dynamics, they’re told that certain parts of the pile-hammer-soil system have a coefficient of restitution of their own. Most of the time they’re solemnly told that the two different “coefficients of restitution” are different. I’ve said this over the years.
But are they that different? The answer is “not really,” but to understand this we need to delve into the physics of impact. The way that wave equation routines such as the WEAP family model use the coefficient of restitution is based on classical impact physics but the way it’s implemented is different from the way the dynamic formulae used it.
In this monograph we’re going to compare the classical impact model with a simple spring-mass model to see if they’re really the same.
Basics of the Coefficient of Restitution
Meriam (1975) defines the coefficient of restitution 
The coefficient of restitution is often considered a constant for given geometries and a given combination of contacting materials. Actually it depends upon the impact velocity and approaches unity as the impact velocity approaches zero. A handbook value for
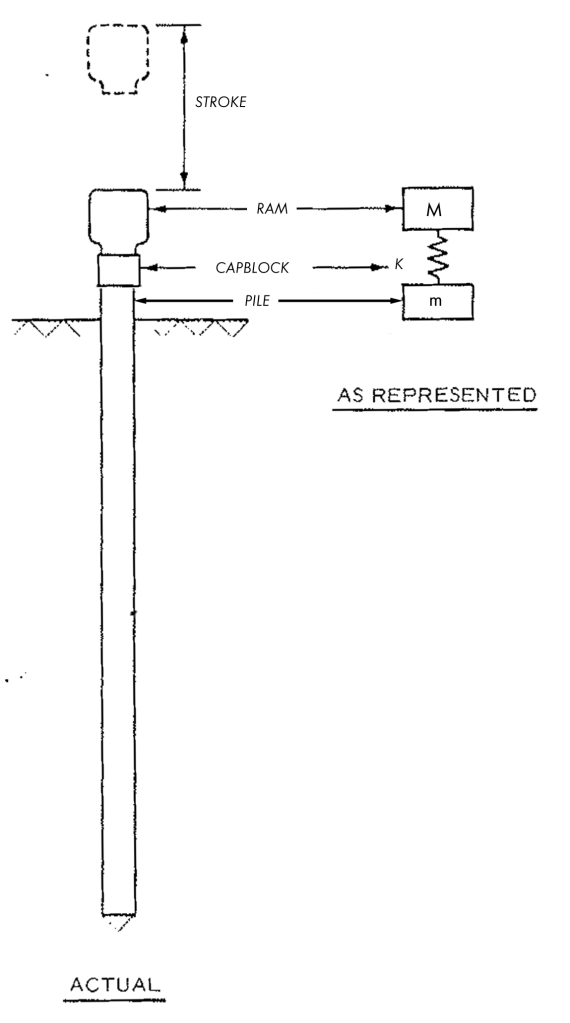
That being the case, in most presentations of the wave equation the coefficient of restitution is shown as the way by which the cushion and other inextensible interfaces respond to compression. A schematic of this is shown below.

To demonstrate the relationship between this and simple impulse-momentum impact mechanics, we will consider this problem in two ways: a) a spring-mass model with the ram, pile and hammer cushion and b) the classic impulse-momentum impact method.
Spring-Mass Model
Let’s start with a spring-mass model. A diagram is shown below.
The equations of motion are as follows:


where
= time
= displacement of ram
= displacement of pile
= spring constant/stiffness of cushion
= mass of ram
= mass of pile
We should first define the following:

where 
This problem is similar in many ways to that of Warrington (2021) and can be solved with Laplace transforms in a similar fashion. We need to define the initial conditions at first impact as follows:



where
= impact velocity of ram =
= gravitational constant
= mechanical efficiency of the hammer
= stroke (of a single acting hammer) or equivalent stroke of a hammer

Because the spring is bilinear, i.e., it has two stiffnesses (one in compression and the other in rebound,) we need to determine the point at which the spring compression is at a maximum and thus the difference between the ram and pile deflection is at a minimum, at the beginning of rebound. Solving for the two deflections yields


where

In this case 

where 

and the spring deflection at that point is

The velocities of the ram and pile are the same:

where 
- Reset the time to zero,
.
- Reset the ram displacement
- Reset the pile displacement to be the maximum displacement of the rebounded spring, thus
- Leave the initial velocities the same as the final velocities from the compression phase.

The equations of motion in the rebound phase are


where


The deflection of the rebound spring is
and the rebound state ends when the rebound spring returns to zero deflection at

At this point the ram is travelling at a velocity of 



where
= stroke speed restoration coefficient of the ram
= stroke speed restoration coefficient of the pile
Making the appropriate substitutions yields for each


The result of Equation (22) is the same as discussed in Warrington and Erofeev (1995). It is interesting to note that the results are independent of the spring system between the ram and the pile.
Standard Rigid Body Model
So is this different from the rigid body model used in the dynamic formulae? The rigid body model is given in dynamics textbooks such as Meriam (1975) and Seely and Ensign (1921). For pile driving the problem is a little simpler because a) the motion and impact of the ram and pile is co-linear (or at least should be) and b) the initial velocity of the pile is taken to be zero. With both of those conditions, the coefficient of restitution of impact is

As was the case before, the impact is in two stages, a compression stage and a rebound stage. At the transition point between the two stages, the ram and pile velocity is the same. By conservation of momentum,

At the point where the ram and pile separate, again by conservation of momentum,

If we combine Equations (3), (24), (25) and (26) and solve for
- The intermediate velocity is the same as given in Equation (13).
- The final velocities of the ram and pile are the same as given in Equations (22) and (23), using the notation of Equations (20) and (21).
The basic result is the same. So what’s the point of going through what we did with the spring mass method? This exercise has accomplished two things:
- We have two different methods which use the coefficient of restitution in different ways which give the same results, one of the goals of the investigation.
- Including the spring can give us an estimate of the ram force, which is a major defect in using simple impulse-momentum assumptions. This was a major defect in many earlier estimates of this, as we discussed in our post So What is the Force of the Ram?
A worked example will clarify things.
Example
Let us consider a Vulcan #1 hammer driving a HP 14×102 pile 50′ long. The hammer is using a micarta and aluminium cushion material in a standard pot (for an explanation of this, see our post Vulcan Onshore Tip #69: Micarta and Aluminum Cushion Material.) We will use all values in this example from the WEAP86 manual. The modulus of elasticity of this material is 350 ksi and the coefficient of restitution is 0.8; spring constant formulae can be found in the WEAP86 manual as well.
Let us begin by considering strictly the rigid body impact model. From this, making the appropriate substitutions the results are as follows:
- The mass/weight ratio between the ram and the pile is
(Equation (3))
- Using the standard efficiency, the striking velocity
ft/sec.
- The “intermediate” velocity at maximum compression
ft/sec. (Equation (13))
- The final velocities of the ram and pile are
and
ft/sec respectively. (Equations (20) and (21))
- The stroke speed restoration coefficients are thus
and
respectively. (Equations (20) and (21))
If we consider the effects of the intermediate spring, the following results can be added:
- The spring constant for the hammer cushion is
lb/ft.
- The natural frequency of the compressed system is
rad/sec (Equation (9).) In U.S. units, the mass needs to be expressed in slugs.
- The maximum compression of the spring is
(Equation (12).)
- The maximum force in the spring is
758,159 lbs. = 758 kips.
It is interesting to note that the maximum g-force on the ram is about 152 g’s, which is a more reasonable value than could be obtained using the “old Vulcan method” of ram force estimation.
References
- Seely, F.B., and Ensign, N.E. (1921) Analytical Mechanics for Engineers. New York: John Wiley and Sons.
- Meriam, J.L. (1975) Dynamics (SI Version.) Second Edition. New York: John Wiley and Sons.


3 thoughts on “A Tale of Two Coefficients of Restitution”