
For the rest of the book, click here.
The main factors that determine the process of immersion in the ground (or extraction from the ground) of a pile subjected to vibration are the intensity of vibrations and the value of the resultant of external statically acting forces applied to the pile.
Consider the influence of each of these factors separately.
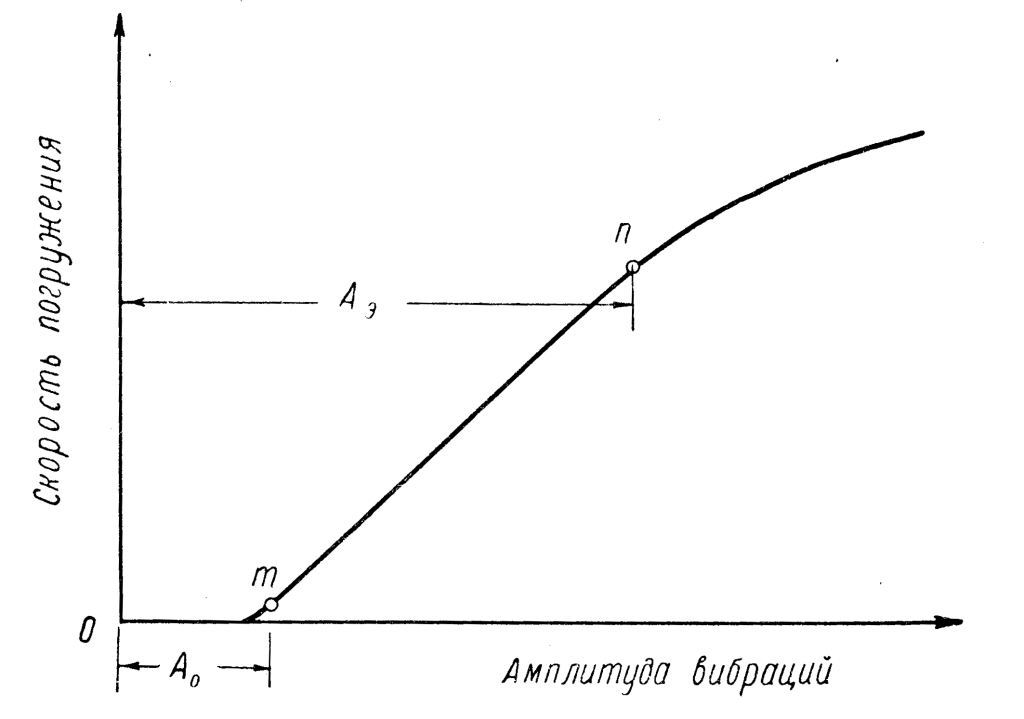

From a schematic plot of velocity (v) pile penetration from the amplitude (A) of vibrations at a constant frequency (Figure 9) it is clear that the pile driving is possible only if when the vibration amplitude exceeds a certain limit Ao, which the authors once called the initial amplitude [49]. The indicated limit is the lower limit of a sufficiently wide area in which the pile sink rate increases with increasing amplitude. In this area (in the section mn of the graph) relationship between speed v and amplitude A practically can be considered linear. Beyond the upper boundary An any further increase in speed slows down; apparently, in each case, there is some the maximum speed possible under given conditions v max which the speed v approaches asymptotically.
Let us take a look at the experimental data.
Figure 10 shows a graph constructed according to the observed data on the immersion of a steel sheet pile of the ShP-1 type in dense water-saturated sand. When constructing, the results of measurements performed by the authors at a frequency of 1500 RPM and an immersion depth of 7–8 m were used. In Figure 10 it can be seen that in this case the value of A0 is about 1.5 mm; a decrease in the increase in velocity begins approximately at Ae > 5 mm.
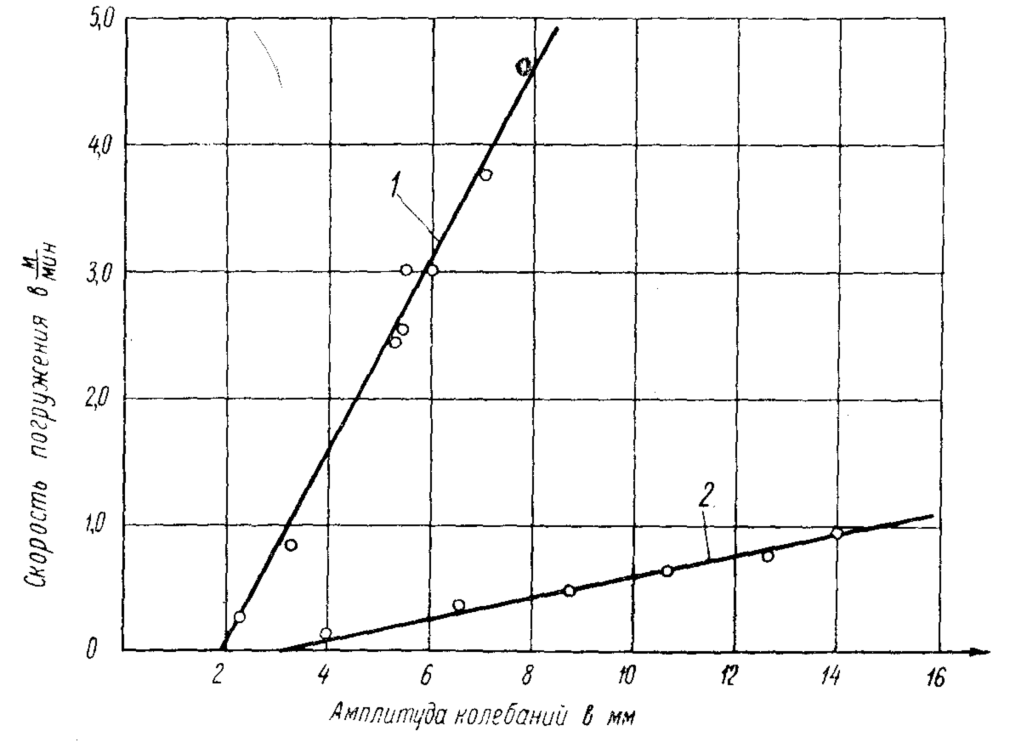
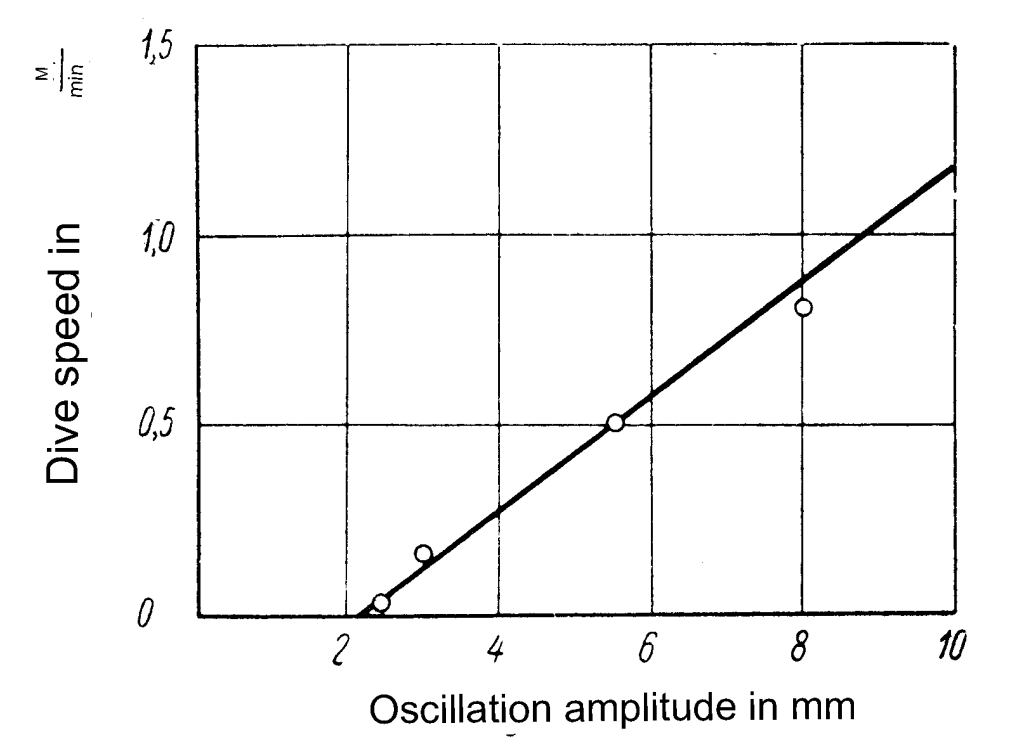
The existence of the limit Aeis still evidenced by single observations made during the immersion of steel sheet pile; when driving piles, in no case was this limit reached. Figures 11and 12 are graphs of dependence of the speed of immersion on the amplitude of vibrations of wooden piles and open-ended cylindrical reinforced concrete shells. In both cases, the dependence under consideration is of a clearly pronounced linear character. Note the significant difference in the speed of immersion of wooden piles in silty water-saturated sands and in clay soil; for example, with the same amplitude A = 6 mm: in the first case, the speed v is approximately equal to 3 m/min,and in the second, only 0.2 m/min, i.e. it turns out 15 times less.


Similar results were obtained in a number of other cases.
The very fact of the existence of the initial amplitude Ao is represented as quite natural and is explained by the influence of elastic properties of the soil massif. Experimental data show that the value of Ao depends mainly on the frequency of vibration, the size and the shape of the piles. It can, for example, be considered established that under the same soil conditions the value Ao turns out to be the more significant, the larger cross-sectional the dimensions of the loaded pile. It is also important to note that this value decreases with increasing frequency of vibration, as shown in Table 3.
Production observations have established that the limit depth of the immersion of piles with relatively large cross-sectional sizes, for example, reinforced concrete piles of a solid section or any piles in the presence of solid layers in the soil mass soils, significantly depends on the amplitude of vibrations; however, any quantitative indicators of this dependence so far time has not been experimentally obtained.

We have already said that the phenomenon of pile failure occurs when the perturbing forces of the vibrator at these conditions are sufficient to overcome the resistance soil failure. At one time [50], the authors proposed for the approximate estimates of these resistances take a generalized characteristic soil properties, which is called the critical resistance disruption; this concept defines the unit area of the lateral surface of the immersed part or – for a sheet pile – to a unit of pile length, the values of the disturbing forces necessary to ensure a sustainable effect failure in given ground conditions.

It is easy to see that the value of the critical resistance failure in each case should depend not only on the soil properties, but also from some other factors. Among the latest the most important, apparently, are the size and shape of the pile. This value, moreover, should depend significantly on the ratio between the frequencies of natural and forced vibrations of the piles. Thus, the value of critical resistance relapse should be considered only as conditional design characteristic of soil properties at given pile dimensions. However, this circumstance cannot serve as an obstacle to a practical use specified characteristic.
For this it is necessary only to differentiate the relevant experimental data and establish on their basis the calculated values of the critical resistance to failure by types and sizes of piles.
| Characteristics of immersed bodies | The value of Ao in mm, at vibration frequencies ah in RPM | ||
| 300-500 | 1500 | 2300-2500 | |
| Bodies with significant cross-sectional dimensions (piles and pipes with a closed end) | 3.0-6.0 | 2.0-2.5 | – |
| Bodies with relatively small cross-sectional area (steel sheet piling, shell piles, immersed with simultaneous excavation) | 1.5-2.5 | 1.2-1.5 | 0.5-0.8 |
To date, a fairly extensive experimental database exists that allows you to set numerical values critical resistance to failure of piles of various types in different soil conditions
Let us start by considering the experimental data obtained as a result of observations of the immersion and extraction of metal sheet pile. These data are relatively easy to process, since in more or less homogeneous soils, not only with extraction, which seems obvious, but also when immersed, the final results of soil resistance on sheet piling can be neglected without sacrificing accuracy.
The correctness of this position is confirmed by experiments carried out at the Stalingradhydrostroy of the Central Research construction laboratory under the direction of E. M. Sinelnikova [55] with the participation of the authors, as well as production observations that we have made over a number of years in Leningrad. Thus, observations have shown that any kind of configuration changes : sheet pile ends, welding to this end pieces of metal, etc. In homogeneous soils, these practically do not affect the speed and maximum depth of immersion sheet pile. For example, V. E. Romanovsky at Stalingradgidrostroy carried out experiments, during which steel corners, increasing the toe area by 2-3 times to the toe face of sheet piles type ShP-l, were welded (normally to the pile axis and under different corners,) and any noticeable deviations in speed or the depth of immersion of the sheet pile from normal values was not observed in any case.
We present the experimental data obtained at Stalingrad hydro construction determination of critical resistance to failure flat profile steel sheet piling (ShP-l type) in medium-grained water-saturated sands with gravelly layers. The data are derived from a large number (more than 500) field observations. Each observation covered the entire immersion cycle of individual sheet pile and included several dozen measurements of the amplitude of its vibrations and speed of movement. Measurement of results were entered into tables and used to construct the corresponding graphs. Characteristics of vibrators, as well as the dimensions of the immersed sheet pile are summarized in Table. 4.
| Hammer Index Number | Characteristics of vibratory hammers | Dynamic Force, tons | Pile Length, m | Tip Elevation at Full Penetration, m | Pile weight  , tons , tons | A∞, mm | ||||
| Eccentric Moment, kg-cm | RPM | Hammer Weight  with clamp, tons with clamp, tons | ||||||||
| 1 | 850 | 1100 | 0.7 | 13.5 | 10.0 | 8 | 0.65 | 6.0 | ||
| 2 | 850 | 1500 | 0.7 | 21.0 | 13.5 | 12 | 0.88 | 5.4 | ||
| 3 | 1000 | 1500 | 0.7 | 25.0 | 15-16 | 14-15 | 0.98 | 6.0 | ||
where
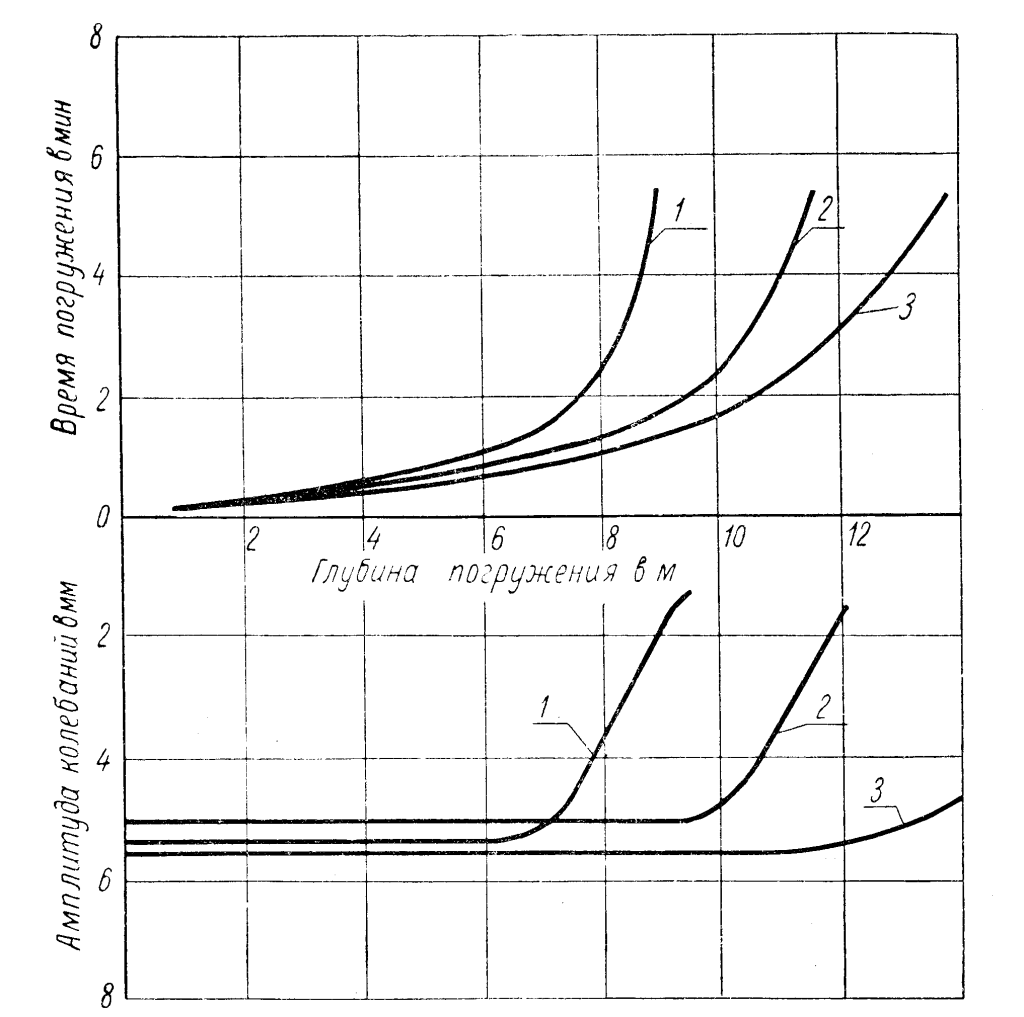
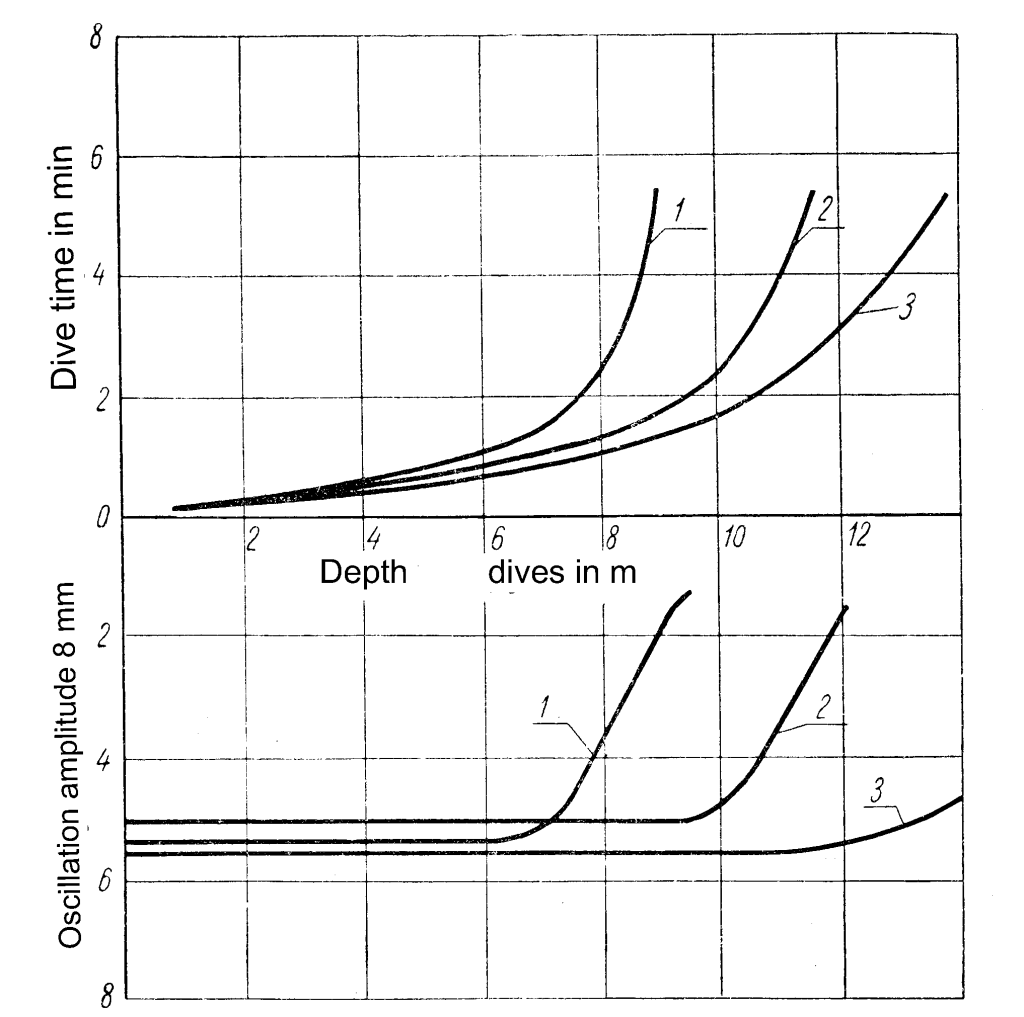
Figure 13 shows the combined dependency graph immersion time and vibration amplitudes of the sheet pile from the depth of immersion; the graph is built according to the data of all measurements made Central Research Laboratory Stalingradhydrostroy.
Looking at the graph, one can see that for all three vibrators, vibration amplitudes initially retain a constant value, which differs little from the calculated values corresponding to the case of the absence of sheet pile connections with the soil (see the last table, Column 4.) These values are 4-5 times higher than the value of the initial amplitude. As a result, immersion to some depth occurs with approximately the same and sufficiently high speed, up to 10 m/min. When the depth is reached at which the oscillation amplitude begins to decrease, the velocity of the pile is sharply reduced and the immersion stops. This phenomenon occurs with piles immersed by vibrator No. 1 at an immersion depth of 7-8 m,vibrator No. 2, about 12 m, and No. 3 vibrator, 15 m.
Therefore, the critical shear strength, referred to 1 m pile length, in this case will be:

Through similar observations of sinking and retrieval sheet pile of various profiles, the authors managed to determine the values of τ’ K for some other soil conditions; summary data of observations made, including data TsNIL Stalingradgidrostroya, are given in Table 5.
| Type and depth sheet piling | Soil characteristics | Value critical resistance disruption in t/m |
| ShP-l; immersion depth 10-15 m | Medium-grained sands with separate gravelly layers (Stalingradgidrostroy) | 1.7 |
| Larsen II 1; PZ-38; immersion depth 12-14 m | Weak plastic clay and loose water-saturated sandy soils (neva river mouth area) | 1.2 |
| Larsen IV and W; immersion depth 15-17 m | 1.4 | |
| Larsen IV; immersion depth 12 m | Dense moist dusty loam (Leningrad, site plant “Electrosila” by S. M. Kirova) | 2.0-2.2 |
Due to the presence of significant toe resistances, the definition of critical shear strength for piles turns out to be more difficult than for steel sheet pile. However, in a number cases, it was possible to obtain numerical values of the critical resistance to failure of piles of various types and sizes in different soil conditions. These values are summarized in Table 6. It can be seen from the foregoing that the role of vibration frequency in the process vibration immersion of the pile is very significant – before only insofar as this process can occur only when the perturbing forces of the vibrator reach some established above the limits, and the magnitude of these forces at the same same moment of unbalances depends on the square of the specified frequency.
| Characteristics and dimensions of piles | Soil characteristics | The value of critical resistance in t/m | Researcher |
| Wooden splices and steel pipes (with a closed lower end) with a diameter of 25-32 cm; immersion depth 12-15 m | Weak plastic clay soils and loose fine-grained sands | 0.5 – 0.8 | O. A. Savinov and A. Ya. Luskin |
| Reinforced concrete piles with a section of 40×40 cm; immersion depth 15-16 m | 0.6-0.7 | According to the experiments of B.P. Tatarnikov, (processing of experimental data produced by the authors) | |
| Reinforced concrete tubular piles with an outer diameter of 0.96 m; immersion depth up to 18 m | 0.8 -1.0 | A. Ya. Luskin and Yu. G. Melbart | |
| Reinforced concrete piles with a section of 40×40 cm; immersion depth 12-14 m | Dense clay soils | 1.5-2.0 |
Having noted this important circumstance, let us proceed directly to the consideration of the dependence of velocity and depth that are of interest to us from the vibration frequency of pile driving. To properly evaluate the influence of this factor, we present the experimental data initially for the case when lateral resistances predominate pile driving, and then for the case when the prevailing frontal resistances become important.
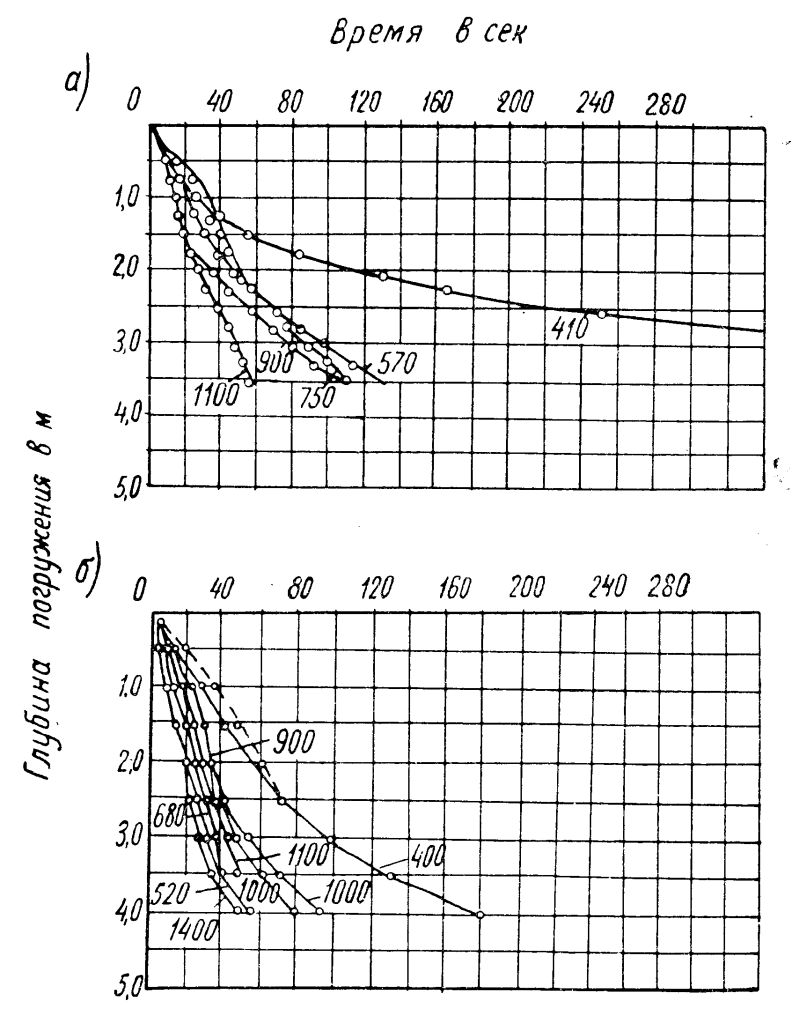
For the first case, a steel sheet pile is typical, and immersed in homogeneous soil. Experiments have shown that the speed and the maximum immersion depth of such a sheet pile is significantly depends on the vibration frequency. Figure 14a showns hodograms of the vibration immersion of steel sheet piles of the ShK-1 type into plastic loam, constructed according to the data of experiments by N. A. Preobrazhenskaya [41], and carried out at different vibration frequencies. It can be seen from the graph that as the frequency increases, the speed immersion increases substantially; for example, when no = 570 RPM, the average speed is about 1.7 m/min, and at no = 1100 RPM, it reaches 3.6 m/min.
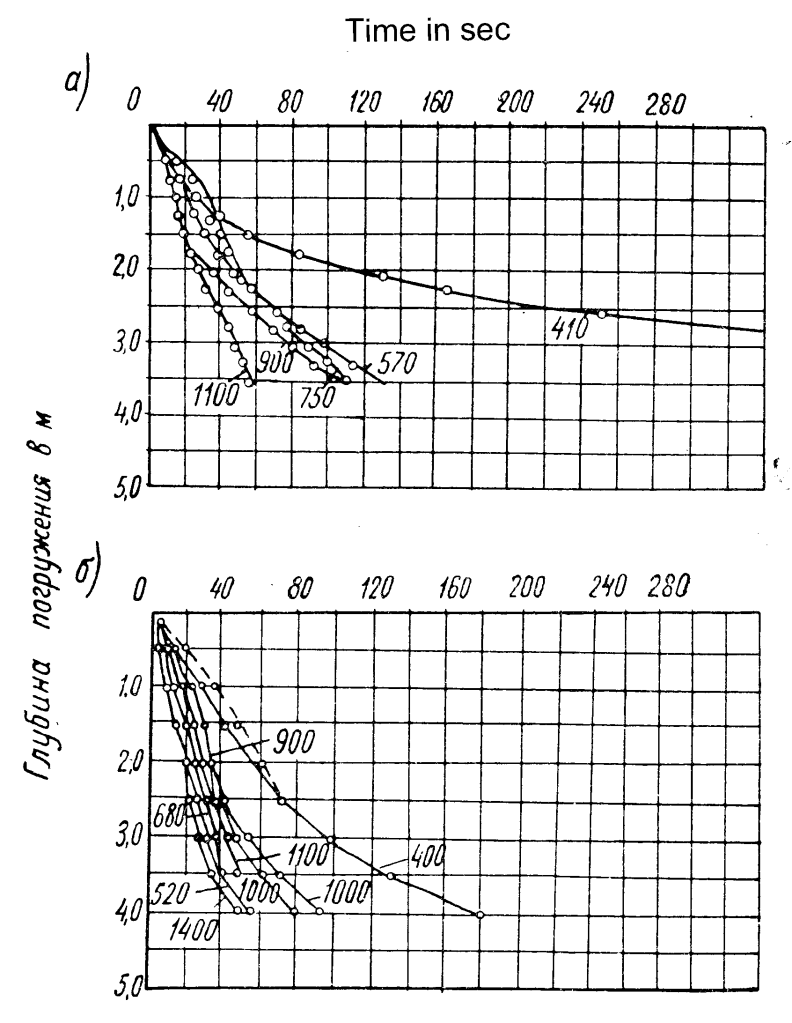
On the nature of the dependence of the limiting depth of immersion sheet pile on the frequency of vibrations, one could get an idea based on experimental the data that we cited. In weak clay and loose water-saturated sandy homogeneous soils depth as a first approximation it could be considered proportional to the vibration frequency squared. In soils, density which are significantly increases with depth as well as containing hard layers, this dependence does not appear so much but still remains very significant.
For the second case, when in general soil resistance body immersion prevailing is primarily toe resistance, and lateral resistance is negligible, piles are typical, and the cross-sectional dimensions of which are relatively large. The rate of sinking of such elements is much less dependent on on the vibration frequency than the sinking speed of a steel sheet pile. How true this statement is can be judged by the hodogram vibration driving of wooden piles shown in Figure 14b.
The dependence on the frequency of vibrations of the maximum depth of immersion of piles is complex.
In cases where the immersion is suspended due to stopping piles and a decrease in the amplitude of vibrations, an increase frequency of the latter resumes the process and increases the depth diving. If the stop of the immersion is caused by a meeting of pile toes with a layer of dense soil or some other solid inclusion, increasing the immersion depth due to frequency increase is either negligible or nonexistent.
We turn now to the dependence of the speed and maximum depth of immersion of a pile subjected to vibration, on the value of the resultant external forces. Schematically, a graph of this dependence, on which the values of the resultant external forces are related to the unit area of the cross section of the pile, is shown in Figure 15. The graph is based on the analysis experimental data accumulated by the authors as a result of long-term study of the features of the process of vibration pile driving and field observations. Looking at the graph, you can see the following:
- Driving a pile subjected to vibration becomes feasible only when the pressure on it, including its own weight, exceeds a certain limit (po ); as experiments show, this limit (at one time the authors called its initial pressure) depends on the type and condition of soils, the size and shape of piles, as well as the mode of vibration.
- The above limit serves as a lower bound on narrow area in which the pile sinking speed increases significantly with increasing pressure and reaches maximum at some specific pressure pe which can be considered as the limit of the effective increase in pressure.
The limit pE depends on a number of factors, the most important of which is the ratio of the resultant of all applied to the pile of forces Q to the amplitude of the dynamic force Po of the vibrator and the ratio of the natural vibration frequency of the pile to the vibration frequency. - Beyond the pE limit, a decrease in the rate of immersion begins with an increase in the pressure acting on it; in those cases when the static critical load on the pile (in the conventional sense) at a given depth of immersion significantly exceeds the amplitude of the disturbing force of the vibrator, at a certain limiting ratio Q/Po the movement of the pile is completely suspended.


In 1950, at a construction site composed of water-saturated sands and weak clay soils, in which they sank steel sheet pile, reinforced concrete and wood piles, the authors of [49] for the first time set up experiments that had to study the effect on the process of vibrational immersion piles of external forces statically applied to it. Immersion was carried out using a vibratory driver weighing 1.5 tons with an eccentric moment of 350 kg-cm and a speed of 2300 rpm. To be able to change the pressure on the pile, a shock absorber was applied. Additional loads were attached to it with a total weight of up to 5 tons without changing the vibration mode of the pile.
Already the first experiments showed that the pressure on the pile plays a very significant role. So, for example, on a wooden pile with a length of 13 m and an average diameter of 27 cm, a vibratory driver was first used without surcharge, which turned out to be possible to load a pile in 8 minutes. to a depth of only 4 m. Then the vibratory driver was turned off and a surcharge added. After that, the pile was easily driven to the full depth.
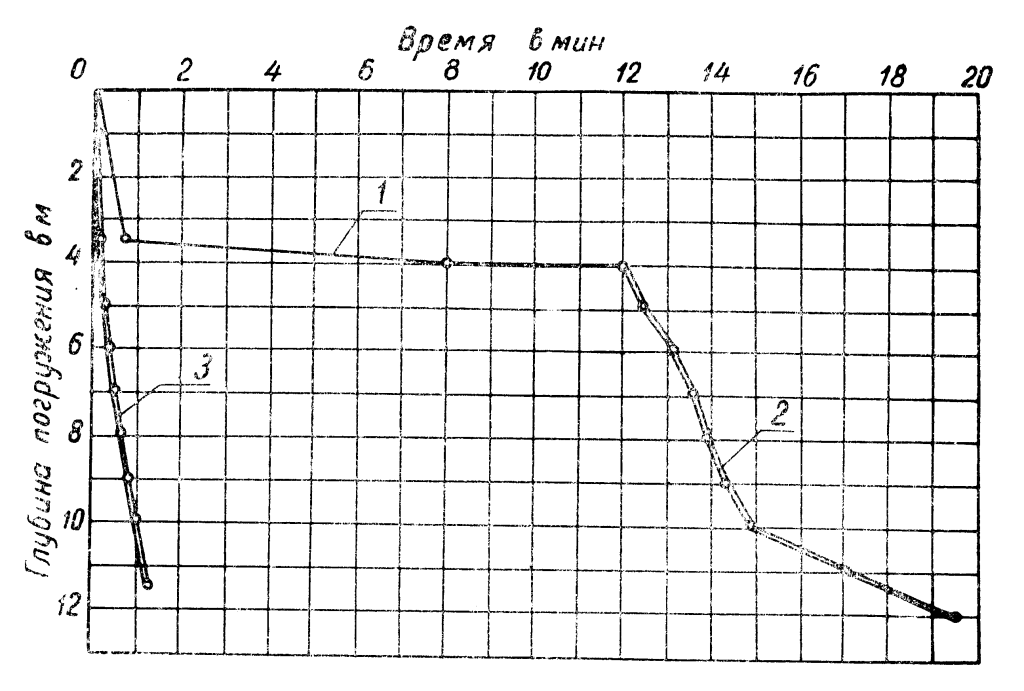
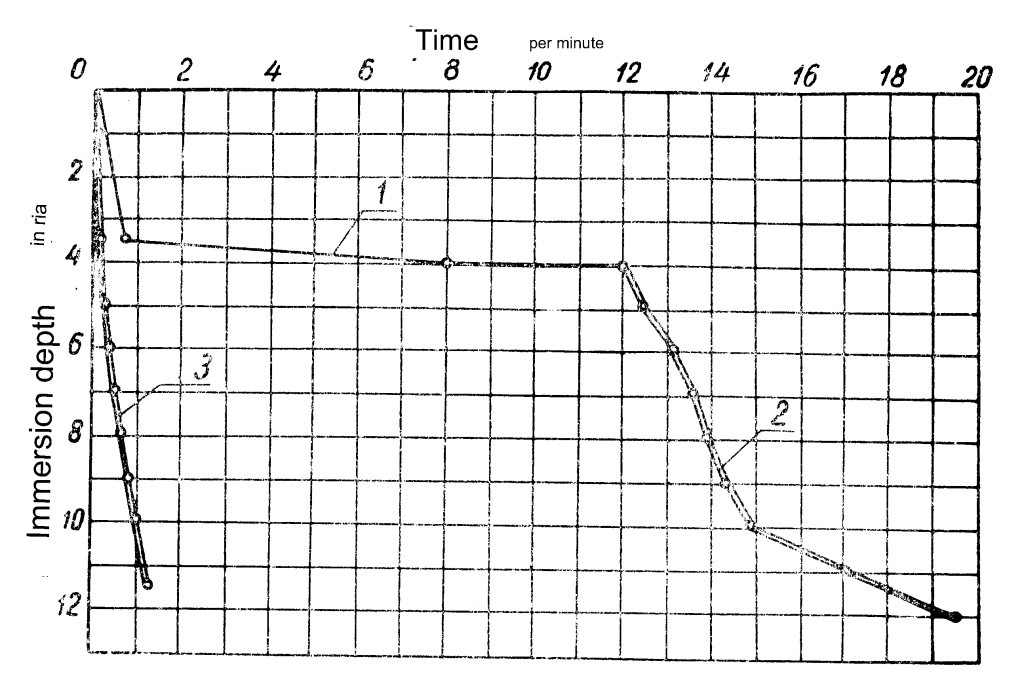
The driving pattern of this pile is shown in Figure 16. Here is a hodogram of another pile of the same dimensions, immersed by a vibratory driver with a surcharge mounted before starting the dive.
In 1951-1952. experiments were continued. For immersing experimental piles, a vibrator with a speed of 1500 rpm and eccentric moment which could change in the range from 300 to 1000 kg-cm. The design allowed attach piles to drive without changing the vibration mode with different weights. In the experiments, immersion of wooden piles 12 m long and with an average diameter of about 26 cm in clay soils (band clays, moraine loams) was accomplished.
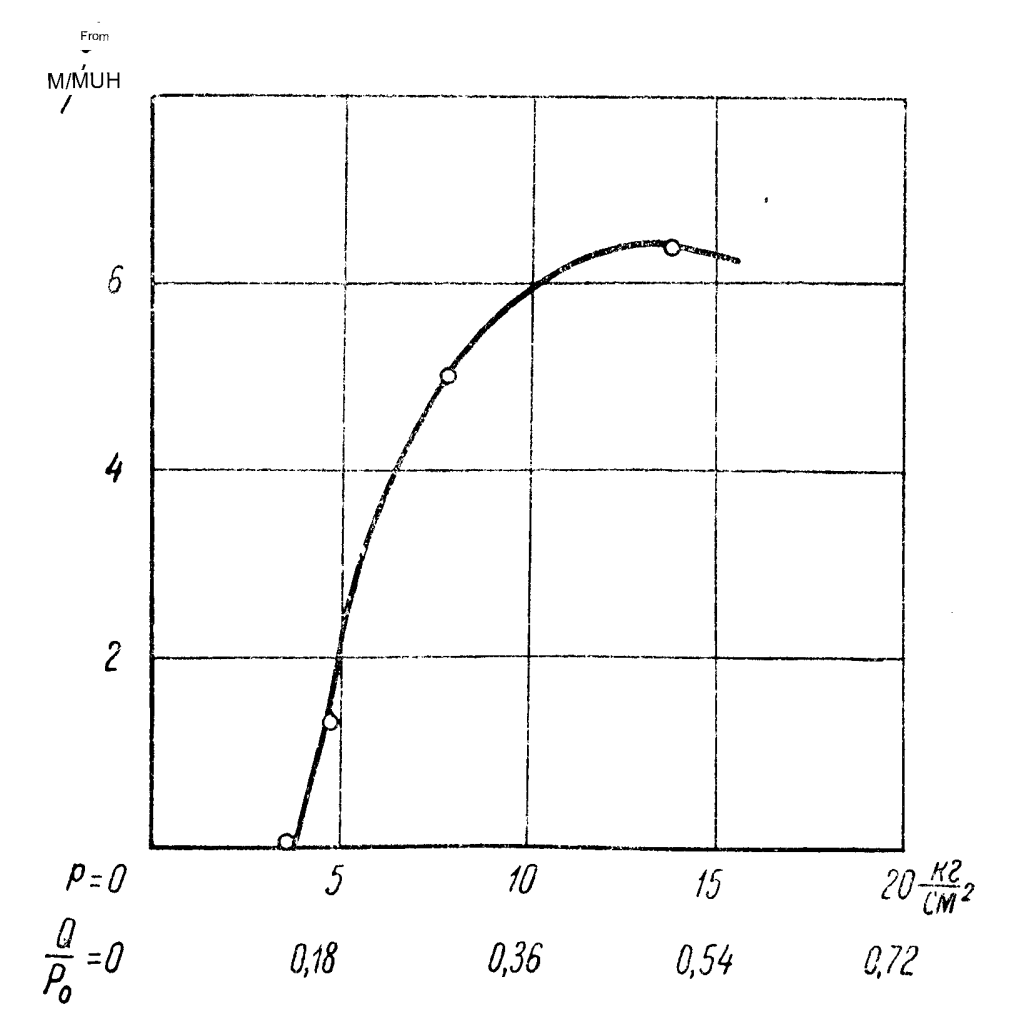
The results of the experiments are presented in the form of a graph (Figure 17), from which it can be seen that the value of the initial pressure turned out to be close to 3.8 kg/cm2 and the highest immersion speed was 6.5 m/min, which was achieved with a Q/Po ratio of about 0.4.

In subsequent years, the accumulation of experimental data characterizing influence on the process of vibrational immersion of the value pressure applied to the pile, continued, and it was found that in the same ground conditions, the value of Po the initial pressure most essentially depends with the cross-sectional area of the submersible body, increasing with this area.
Summary average figures for change initial pressure values depending on cross-sectional area piles in water-saturated sandy and weak clay soils are given in Table. 7.
The data given in Table 7 show that the vibrational immersion of bodies having small cross-sectional dimensions is quite feasible with relatively small external forces, which, as a rule, turn out to be much smaller than the forces corresponding to limit pe effective pressure.


As an example, Figure 18 shows a dependency graph on pressure (which was increased by adding inertialess loading) with a sinking speed into weak clay soil of a steel tube with an outer diameter of 33 mm (immersion depth is 15 m.) As can be seen from the graph, the gap between the initial pressure and the limit pe effective increase in pressure, which was not achieved in the experiment, is very significant; sufficient in magnitude sinking speeds have place at pressures p << pe. The situation is different when the area cross section of the submerged body is relatively large. Here, for the successful immersion of the body, it is required to apply significant in magnitude, the external forces at which the indicated gap between the values of po and p e is usually insignificant. The latter circumstance in some cases makes strive to ensure that the immersion is carried out at a pressure, close to the limit pe .
| Submerged body type | The main dimensions of the piles | Section shape in m | Vibration frequency in counts/min | po in kg/cm2 | |
| Cross-sectional area in cm2 | Immersion depth | ||||
| Thin steel pipes | up to 100 | up to 20 | Circle | 1500 | 1-2 |
| Wooden piles | 400-800 | 10-12 | 1500 | 3-4 | |
| Reinforced concrete piles, steel pipes closed at the bottom | 1200-2000 | 12-16 | Square, circle | 420 | 5-6 |

In Table 7, numerical values of po were obtained when conducting experiments, in each of which the vibration mode of the submersible body provided without undue reserves full pile failure and sufficient excess of vibration amplitude over the value of the initial amplitude. In cases where the effect there is no complete breakdown or when the vibration amplitude is small differs from the initial one, the value of the initial pressure sharply increases. The authors had the opportunity to verify in this, when conducting experiments on piles of various sizes and weight.
Increasing the acceleration of vibrations against the required for ensure the failure of the pile, as well as an increase in the amplitude compared to the required amplitude, apparently, does not significant influence on the value of the initial pressure.
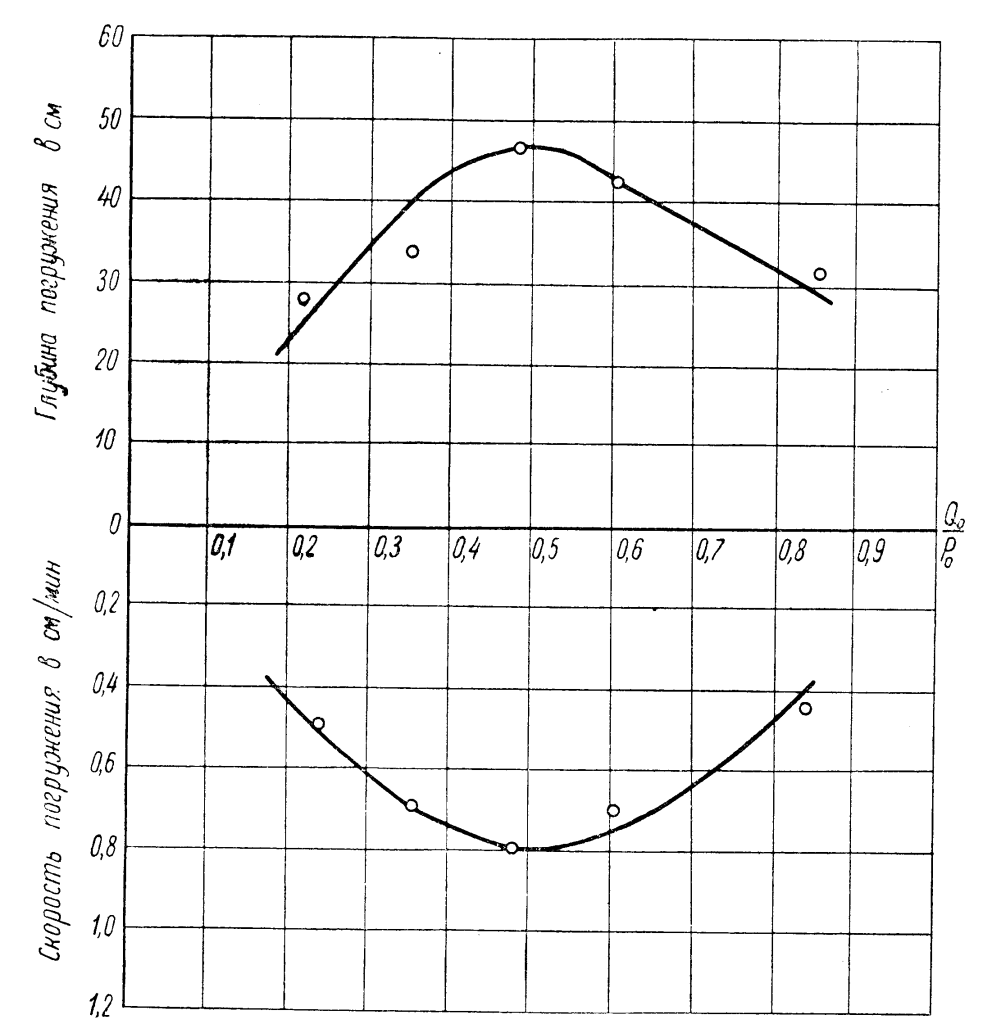
It is possible that the effective pressure limit pe corresponds to not only maximum speed, but also maximum depth piles, as evidenced to a certain extent by O. A. Savinov and E. V. Lavrinovich [48] experiments on vibration immersion into the concrete-filled steel pipes with a length of 0.6 to 3.2 m. One of the graphs constructed from the results of these experiments, shown in Figure 19; the dependency is shown on the top of it from the ratio Q/Pomaximum immersion depth, on the lower parts – the speed of immersion.
As can be seen from the graph, the maximum immersion capacity, on which the maximum immersion depth depends, and the maximum sinking speeds are achieved here at approximately one and the same Q/Po close to 0.5.


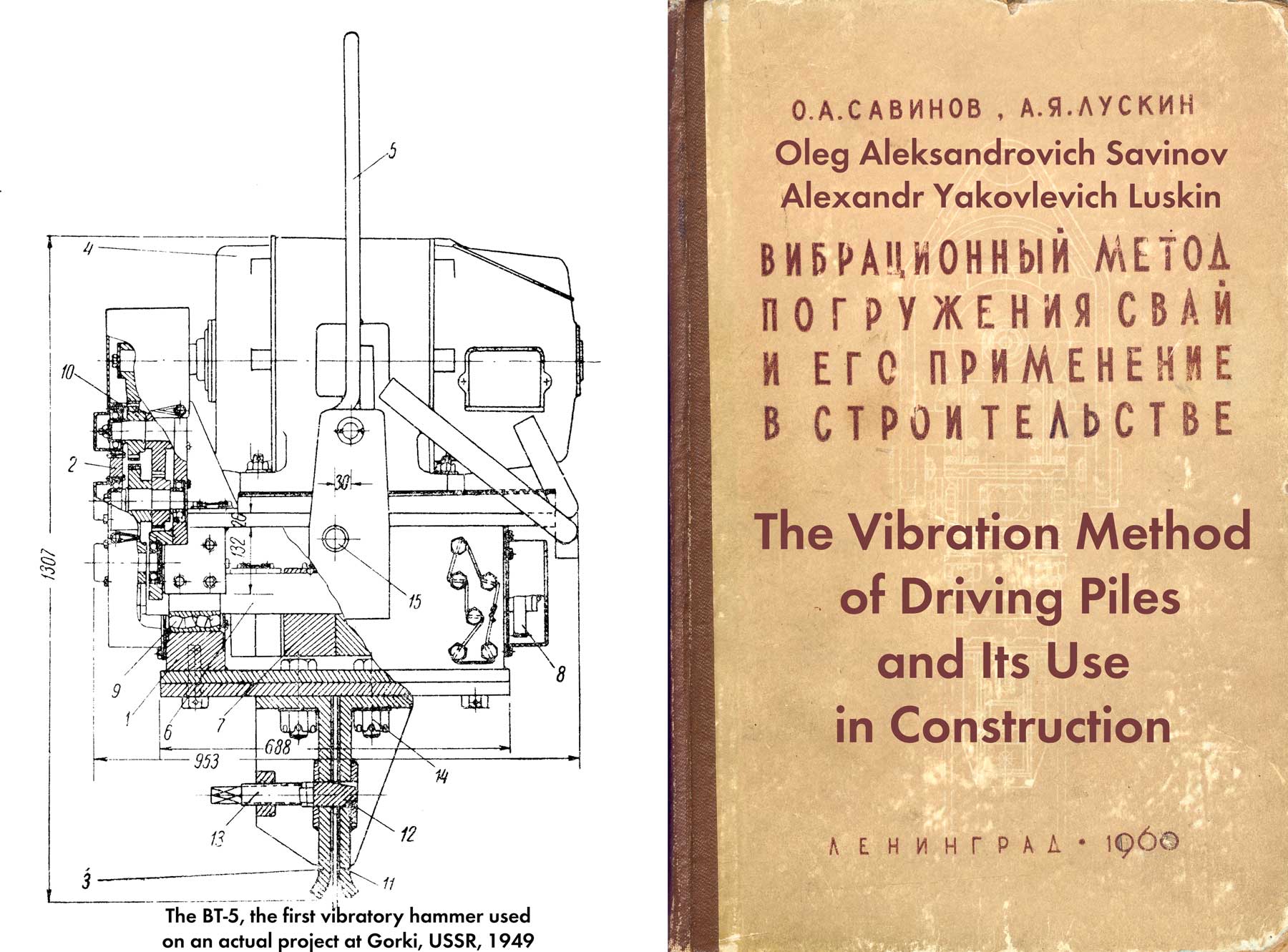
2 thoughts on “Factors on which the speed and depth of immersion of a pile subjected to vibration depend”