
Just as in the study of the vibration sinking process, we limit the steady periodic movement of the impact portion of the vibrating hammer to a period equal to the time of one revolution of the eccentrics. Besides the assumptions in Section 5, we introduce the following also:
- the impact between the vibrating hammer* and the pile is instantaneous and absolutely nonelastic;
- the movement of the pile is considered under conditions where the force of the lateral resistance exceeds the magnitude of the maximum spring reaction during the ascent of the vibrating hammer.
*Besides the cases specifically discussed, the vibrating hammer will be understood to be its impacting part here and in the following.
Assuming that the pile is an absolutely rigid body and the impact of the vibrating hammer on the pile is instantaneous, i.e., can be described by the formulas of classic impact theory, is limited by the known condition (E. V. Aleksandrov and V. B. Sokolinskii, 1969): ty/T > 3-5, where ty is the impact time — according to experimental data (S. I. Lukomskii, 1966), ty = 0.01 – 0.001 sec — and T is the period of natural vibrations of the impacting bodies: for the rod

The possibility of considering the impact to be absolutely nonelastic is associated with the fact that in most cases impact-vibrational sinking takes place with coefficients of restoration of the velocity B that are equal to or close to zero. The so-called quasi-plastic impact takes place at such B values; it is a high-frequency collision of masses that ends in their mutual adhesion, which permits an approximate examination of the interaction of the vibrating hammer and the pile in the form of an absolutely nonelastic impact in the region of existence of the quasi-plastic impact. The boundary of existence of the quasi-plastic impact has the form (R. F. Nagaev and L. A. Nakhamkin, 1969):
![]() (36)
(36)
where β is the ratio of the masses of the colliding bodies (for impact-vibrational sinking, the ratio of the masses of the pile and vibrating hammer); λ = βS1/S2 (S1 and S2 are the forces acting on the colliding bodies); ζ = (v1 – v2)/(v1 + v2), here v1 and v2 are the velocities of the colliding bodies at the moment of impact.
Under real conditions of impact-vibrational sinking, S2 » S1 and v2 = 0; therefore, the inequality (36) can be represented in the form
![]() (37)
(37)
Because the nature of the interaction of the element being sunk and the soil is analogous during vibrational and impact-vibrational sinking (A. S. Golovachev, 1960), all the hypotheses pertaining to this question and assumed in Section 5 for the vibrational action remain valid.
During the impact-vibrational action on the element to be driven, the inconstancy of the rate of rotation of the eccentrics of the vibrating hammer is manifested more strongly than during the vibration due to the presence of impacts, where transitional processes begin to be manifested in some cases in the engine and the variation in speed of rotation reaches 40% (M. A. Guriii and L. V. Stotskaya, 1966). However, this unevenness has little effect on the sinking ability of the vibrating hammer, basically due to the short duration of the transitional processes; therefore, this characteristic of vibrating hammers can be disregarded in examining the processes of impact-vibrational sinking.

The calculation scheme of impact-vibrational sinking in the case of a purely plastic mechanism of soil resistance is depicted in Fig. 21.
The process of impact-vibrational sinking can be presented in the form of a piecewise-linear system with the following stages:
the flight stage of the impact part:
 (38)
(38)
sinking stage of the pile into the soil:
 (39)
(39)
The initial phase angle α is determined from the condition that at time t = 0 the sum of all the forces acting on the impact part is equal to zero, i.e.,
![]() (40)
(40)
In order to perform additional calculations on a computer, the equations and also the initial and final conditions corresponding to them are brought into the dimensionless form by using the following dimensionless parameters additional to Eq. (9)
![]() (41)
(41)
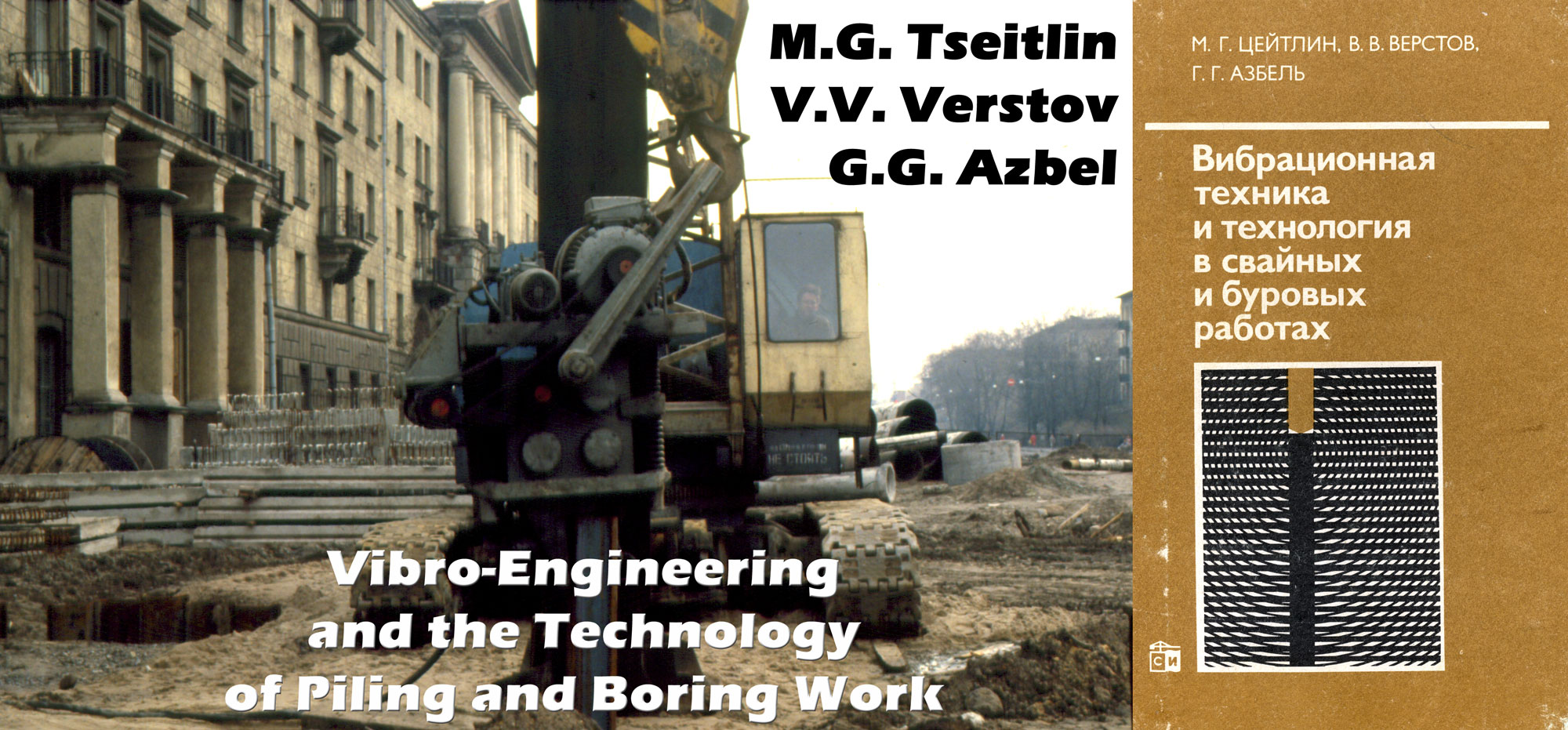
The range of existence of the regime investigated at various values of the dimensionless soil resistance forces is plotted in Fig. 22 in coordinates ξ1 and sin α. An analysis of the data of Fig. 22 indicates that the region of existence of the regime is broadened with an increase in the soil resistance forces and it is quite broad when f + γ > 8. With a decrease in the resistance forces, the region of existence of the regime is narrowed, which imposes corresponding limitations on the choice of parameters of vibrating hammers with unregulated Qh,d and demonstrates the effectiveness of imposing a regulatable external force on the springs of the vibrating hammer (V. V. Verstov and V. M. Lukin, 1974). The broadest region of existence of the regime is at large ξ1 and sin α values.
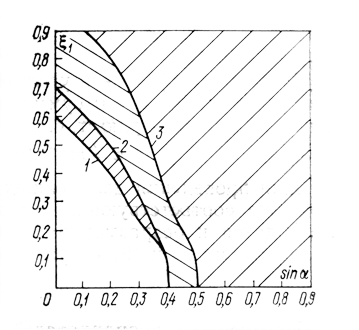
The dependence of dimensionless sinking of a pile y on the vibrating hammer parameter sin α is plotted in Fig. 23. It follows from an analysis of the graph that the optimal values of the parameter sin a are a function of the dimensionless soil resistance value. At small values ( f + γ < 2) the optimal values of the parameter sin a are maximal and are shifted relative to the maximum of the dimension-less impact velocities y1. With an increase in the dimensionless resistance forces, there is a decrease in the optimal value of the parameter sin α and its approach to the value of the parameter at which the maximum value of the dimensionless impact velocity is attained.
In a mathematical description of the impact-vibrational process of extracting the pile, pipes and other elements from the ground the differential equations of motion of the system and their initial and final conditions coincide with the analogous equations and conditions that describe impact-vibrational sinking. In connection with this, it is possible to use the conclusions and calculation graphs of the theory of impact-vibrational sinking for impact-vibrational extraction. In this case it is necessary to bear in mind that the initial phase angle during extraction αi is determined as
![]() (42)
(42)
In soils with a substantial zone of elasticity, impact-vibrational sinking frequently proceeds somewhat differently than predicted by theory, based on the application of a purely plastic model of the mechanism of soil resistance, which is manifested, for example, in an increase in the impact velocities and the power required for the electric motor.

An explanation of these process characteristics is possible if we use the elastic-plastic model of soil resistance, the calculation scheme of which is given in Fig. 24.
in a mathematical description of the impact-vibrational sinking with the elastic-plastic mechanism of soil resistance, the same hypotheses are used as in the purely plastic model; however, the soil resistance corresponds to the Prandtl diagram, and the viscous component of the resistance is approximated by the dry frictional force. The possibility of using the viscous component of soil resistance in the form of a dry frictional force in the calculation models of impact-vibrational sinking was established experimentally (Yu. R. Perkov and V. M. Shaevich, 1974), because it turned out as a result of processing a large number of natural oscillograms that at low velocities of penetration of the pile into the soil the viscous component increases quite intensively. However, at a velocity of 0.3-0.5 m/sec the increase slows down sharply and it becomes practically constant for real sinking velocities that do not exceed 3.2 in/sec.
A block diagram of the algorithm of the problem of impact-vibrational sinking with an elastic-plastic mechanism of soil resistance is presented in Fig. 25.

The initial conditions when t = t0, for the first stage of motion are x = x0; x = x0 = m1/(m1 + m2) (x1)0, where (x1)0 is the impact velocity of the vibrating hammer.
The x0 and (x1)0 values are unknown at the beginning of the calculation, the value of the phase angle α is also unknown; therefore, the the given problem is solved by using the method of successive approximations .
The value (x0)init = 0 can be assumed as the first approximation for the x0 value, and the values of the impact velocity and phase angle, obtained in solving the problem of impact-vibrational sinking in the case of a purely plastic mechanism of soil resistance, can be assumed for the (x1)0 and α values.
As a result of the cyclic nature of the process, the equations α’ = α and x’0 = x0, where α’ is the phase angle in the following cycle examined and x’0 is the initial value of the coordinate of the pile (system) in the following cycle, should be fulfilled at the end of the cycle (at the end of hammer “flight” in the case of a stationary pile.)
The α’ and x’0 values (Fig. 24a) are determined by the equations:
 (43)
(43)
where tts is the duration of the cycle obtained in the calculation; xy = ΔP is the degree of elastic deformation of the soil; x2 is the distance the pile is driven per cycle; and xP is the maximum sinking of the pile that takes place in the cycle.
If α’ ≠ α and (or) x’0 ≠ x0, the values determined from Eqs. (43) are assumed as the new, more precisely defined values for α, and x0, and the calculation is repeated until α = α’ and x0 = x’0 with the prescribed precision.
Computer calculations are performed by using dimensionless variables and parameters of Eqs. (9) and (4-1) and the additional ones:
![]() (44)
(44)
It was established by the calculations that the movement of the pile per impact is non-linearly dependent on the preliminary compression of the working springs of the vibrating hammer, parameter i, in which case the nature of this dependence is associated with the variation in the soil resistance forces. Thus, for a total resistance of f + γ = 4 at f/ γ = 0.8 the driving ability of the vibrating hammer decreases with an increase in the preliminary tensioning of the working springs and is in qualitative relationship with the data of the purely plastic model. At the same time, for f + γ = 2 at f/γ = 0.4 the driving ability of the vibrating hammer, on the other hand, increases with an increase in the prior tensioning of the working springs, i.e., is in contradiction to such a dependence for driving with a purely plastic mechanism of soil resistance.
Regardless of the dependence on the magnitude of the soil resistance forces, an increase in its elasticity — a decrease in the value ξ3 — leads to a reduction in the irreversible part of the pile sinking for one impact.
The differences manifested between the results of calculation using the elasto-plastic and purely plastic models of soil resistance are basically caused by the possibility of separating the hammer from the moving pile. This phenomenon in the overwhelming majority of cases takes place during the movement of the pile under the action of the elastic component of the dynamic frontal resistance of the soil (stage of elastic yield), which leads to a variation in the impact velocities and the position of the eccentrics at the application of the impact on the pile. This characteristic of impact-vibrational sinking with an elasto-plastic mechanism of resistance is a function of the basic characteristics of the dynamic resistance of the soil f + γ, f/ γ , and ξ3. Thus, Figure 26 plots the dependence of the impact velocity of the vibrating hammer y1 on the total resistance of the soil f + γ. It follows from an analysis of Fig. 26a that with invariable parameters of the vibrating hammer its impact velocity is essentially dependent on the dynamic resistance of the soil and its inflexibility. For ξ3 = 1.5, the maximum y1 value corresponds to f + γ ≈ 4, and with an increase in the stiffness of the soil the maximum value of the impact velocity is shifted toward an increase in the soil resistance forces.

Figure 26b plots the dependence of the impact velocity of the hammer on the ratio between the dynamic lateral and frontal resistances at various values of the coefficient of soil stiffness. It follows from an analysis of the Figure that the impact velocity of the hammer is a function not only of the absolute value of the soil resistance forces, but also the ratio between the lateral and frontal resistances. With large values of the coefficient of soil stiffness ( ξ3 = 2.0 and ξ3 = 3.0) with increasing proportion of lateral resistance in the overall value of the soil resistance forces, a practically linear reduction in the impact velocity of the hammer takes place and it approaches the data obtained in studying the purely plastic model of the resistance mechanism. For a dimensionless coefficient of elastic stiffness ξ3 = 1.5, there is a vaguely expressed peak in the impact velocity value y1, at f/γ = 0.5 with its subsequent reduction with an increase in the f/γ ratio with approach to the data of the purely plastic model.
It was established by the calculations that the position of the eccentrics at the time of impact is dependent not only on the prior tensioning of the vibrating hammer springs and the force of gravity of its impact part, but also on the coefficient of soil stiffness ξ3, and also on the magnitude of the dynamic soil resistance forces.

The use of an elasto-plastic soil resistance model permits us to determine the basic dependencies in ascertaining the limiting depth of sinking with the vibrating hammer. It was established by the calculations that with invariable parameters of the vibrating hammer (i, q, ξ1) the limiting depth of sinking, at which there is no irreversible sinking of the pile per impact, i.e., there is a movement of the pile only in the zone of elastic deformations of the soil, is a function of both the boundary value of the dynamic soil resistance f + γ, and on the ratio between the dynamic lateral and frontal resistance f/γ and the coefficient of soil stiffness ξ3 (Fig. 27). It is evident from the Figure that with an increase in the limiting value of the dynamic soil resistance forces, the limiting depth of pile sinking is reduced. An increase in the proportion of lateral resistance in the total value of the soil resistance forces, i.e., an increase in the f/γ ratio, results in an increase in the limiting depth of sinking, which is a function of the coefficient of elastic stiffness of the soil (the depth of sinking also increases with increasing stiffness of the soil.


5 thoughts on “Immersion and Extraction Under the Action of Longitudinal Blows”